
La procedure OrangePi install Debian ti guida passo passo nell’installazione di linux sulla scheda OrangePi:

Probabilmente ricordi l’unboxing della OrangePi dello scorso marzo.
Trovi tutorial e informazioni su elettronica e progetti inerenti l'elettronica come Arduino e le shield collegate
Set 08
La procedure OrangePi install Debian ti guida passo passo nell’installazione di linux sulla scheda OrangePi:
Probabilmente ricordi l’unboxing della OrangePi dello scorso marzo.
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/orangepi-install-debian.html
Set 06
Dual stepper motor shield buttons aggiunge due pulsanti per ciascun motore stepper per controllare il corrispondente motore passo-passo.
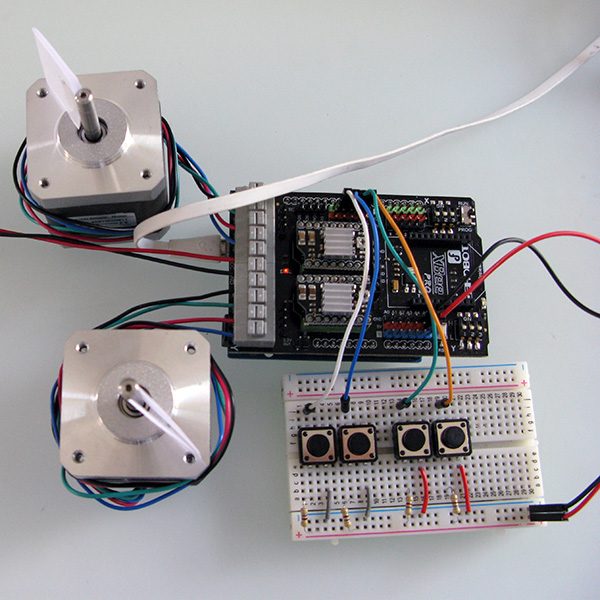
I due motori stepper possono essere controllati in modo automatico, come hai letto nel precedente articolo, o aggiungendo dei pulsanti puoi decidere tu i movimenti da inviare alla dual stepper motor.
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/dual-stepper-motor-shield-buttons.html
Set 04
I commenti agli articoli e le email spesso chiedono se esiste una stepper motor shield a cui collegare due motori passo-passo.
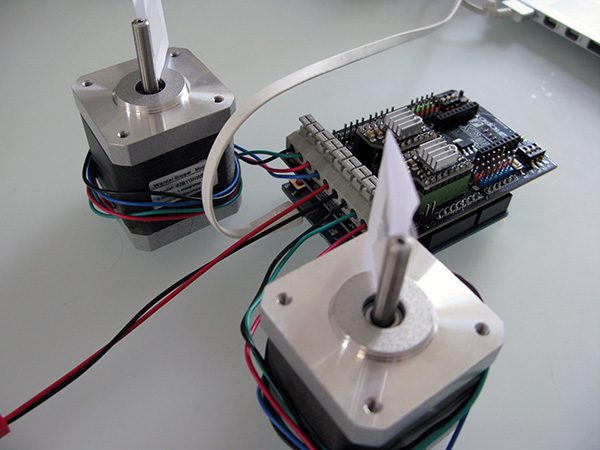
La richiesta che più spesso mi è arrivata ultimamente è di poter controllare in vari modi due motori passo-passo, o stepper, in pratica l’esigenza è di controllare un sistema di assi cartesiani con un joystick.
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/stepper-motor-shield.html
Set 01
Oggi ti mostro una rassegna di DIY robot che ho collezionato nelle ultime settimane e trovo davvero interessanti.

la robotica e le cose auto costruite sono entrambe due mie passioni che più volte ho raccontato su questo blog.
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/diy-robot-video.html
Ago 30
WiFi WeMos OSC Processing conclude la serie di articoli dedicati alla trasmissione i2c e Osc da WeMos.

Se hai letto i precedenti articoli: Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/wifi-wemos-osc-processing.html
Ago 28
E’ il momento di gestire la comunicazione WiFi WeMos IIC Attiny85 per sfruttare le caratteristiche WiFi della WeMos.
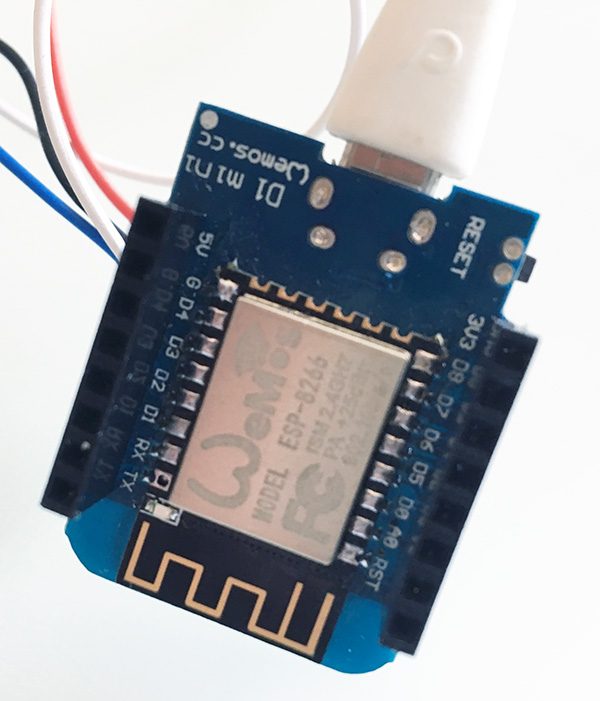
In primo luogo sai che la WeMos è basata sulla ESP8266 che puoi utilizzare sia come micro controllore sia per la comunicazione WiFi.
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/wifi-wemos-iic-attiny85.html
Ago 25
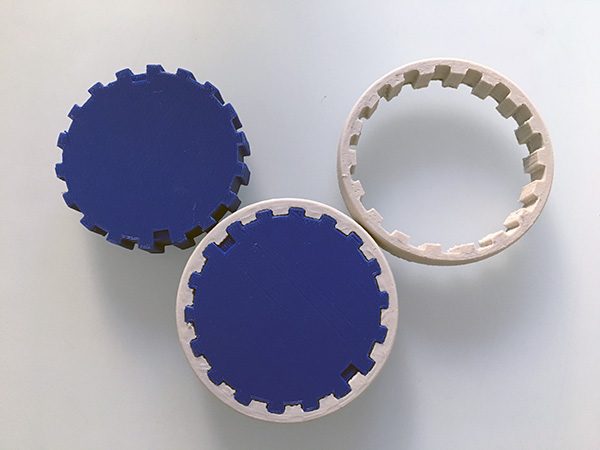
Dopo aver stampato gli pneumatici con la stampante 3D ho deciso di realizzare lo stampo ZeroBot tires per procedere alla realizzazione delle stesse in silicone o gomma liquida.

il primo passo è prendere il modello 3D delle ruote, puoi usare il file stl del progetto.
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/stampo-zerobot-tires.html
Ago 23
Continuando a sperimentare con Attiny85 IIC WeMos puoi usare la comunicazione I2C per collegare alla WeMos segnali provenienti da più fonti analogiche.
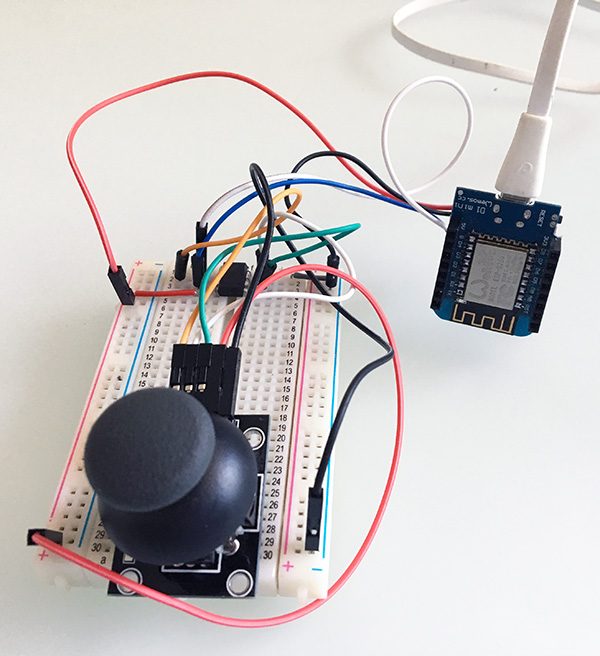
La WeMos è dotata di un solo ingresso analogico ADC, a cui collegare, ad esempio, un potenziometro o una sonda di temperatura analogica.
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/attiny85-iic-wemos.html
Ago 21
SSD1331 oled rgb WeMos è dedicato alla possibilità di utilizzare un display oled con driver di controllo SSD1331 con una WeMos.
Già in passato ho testato e scritto un articolo display in abbinamento ad un arduino uno e usando le lbrerie Adafruit.
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/ssd1331-oled-rgb-wemos.html
Ago 14
ZeroBot RPi Zero camera panel descrive il pannello frontale del robot a cui oltre alla camera RPi ho aggiunto la possibilità di inserire due sensori frontali per evitare gli ostacoli.
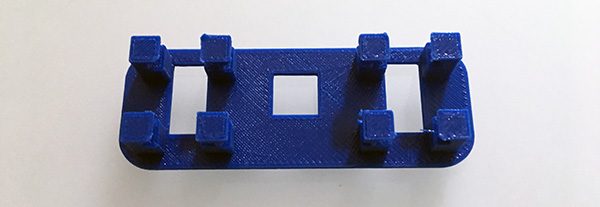
Il ZeroBot RPi Zero camera panel è diverso da quello originale per ospitare i due sensori IR della pololu che serviranno per evitare gli ostacoli.
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/zerobot-rpi-zero-camera-panel.html
Ago 11
Finalmente le ruote nel ZeroBot RPi wheel per fornire al tuo robot la corretta modalità di spostamento.
Le ruote sono la parte fondamentale del robot ed assicurano la corretta propulsione. Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/zerobot-rpi-wheel.html
Ago 09
E’ arrivata l’ora di aggiungere i motori: ZeroBot RPi gear motor. Monta i motori con moto riduzione ( gear ) al tuo ZeroBot RPi
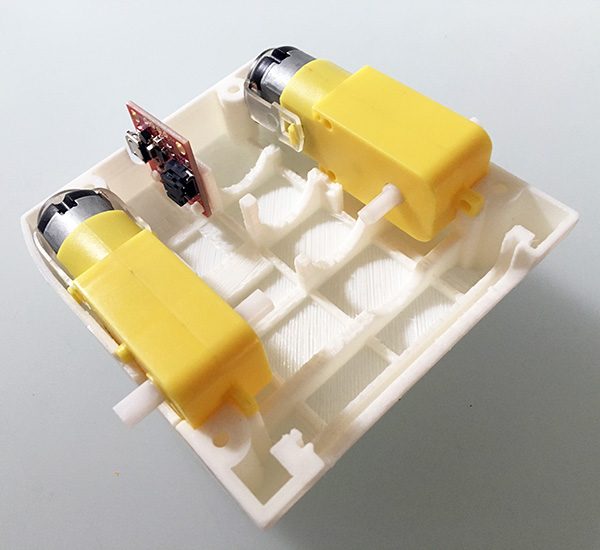
Hai già letto nei precedenti articoli delle variazioni che ho eseguito al ZeroBot RPi, queste valgono anche per la parte motori. Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/zerobot-rpi-gear-motor.html
Ago 07
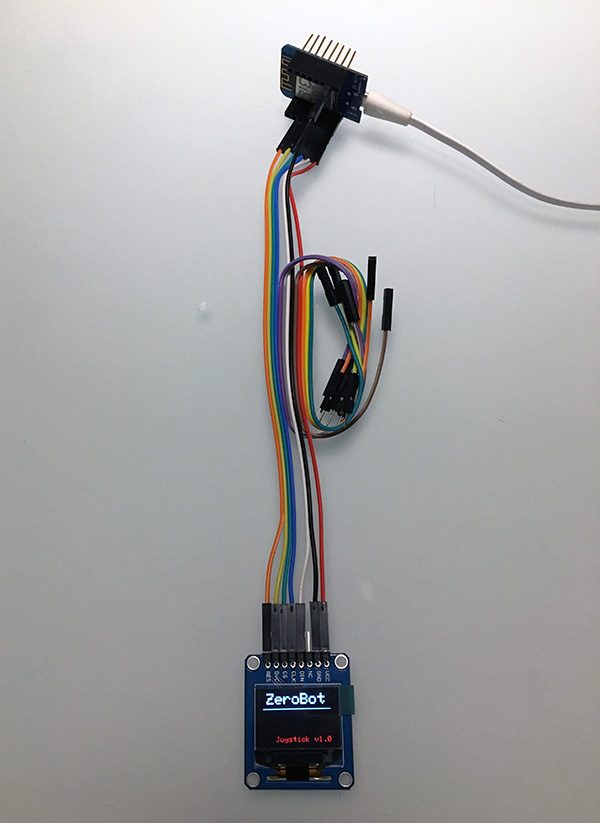
ZeroBot RPi Zero W model è la mi a versione del più noto ZeroBot – Raspberry Pi Zero FPV Robot che probabilmente hai visto su internet

Qualche mese fa è stato postato sui canali social di Hackaday.io il progetto ZeroBot realizzato con una RPi Zero, da cui la prima parte del nome, ed un robot completamente stampato in 3D.
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/zerobot-rpi-zero-w-model.html
Ago 04
LoRa Node gitHub è la pubblicazione su gitHub del progetto LoRa Node v1.3 che hai letto nel precedente articolo.
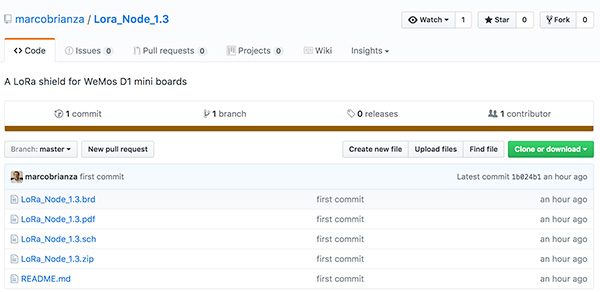
L’origine della shield la puoi leggere in questo articolo in cui leggi la storia e l’obiettivo della LoRa Node shield per WeMos.
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/lora-node-github.html
Ago 02
LoRa Node v1.3 pcb è un progetto realizzato per l’AUG Milano in ottica IoT e sviluppo di tecnologia LoRa Wan.

Da qualche anno presso l’AUG Milano si parla di LoRa Wan e di reti dedicate all’IoT sperimentando tecnologie consolidate e innovative.
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/lora-node-v1-3-pcb.html

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza Creative Commons Attribution Non commercial Share Alike 4.0 International
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza Creative Commons Attribution Non commercial Share Alike 4.0 International