In questi giorni ho provato un nuovo driver per motori passo-passo il drv8825 stepper driver prodotto dalla pololu.
Il drv8825 stepper driver ha delle interessanti caratteristiche elettriche ed è sufficientemente piccolo per essere impiegato anche nei progetti in cui lo spazio è ridotto. Continua a leggere
Il driver della Pololu a4983 è un driver per motori passo-passo semplice da utilizzare e molto preciso, l’integrato a4983 è utilizzato anche per la realizzazione di altri driver non prodotti dalla pololu ed il suo funzionamento non differisce da questo articolo.
Ho trovato in internet due versioni di questo driver entrambe prodotte dalla Pololu una con regolatore di tensione ed una senza il regolatore di tensione entrambe le versioni sono state sostituite da una scheda identica basata dul regolatore a4988.
Continua la serie di articoli su come utilizzare la “Motor Shield Fe” ed Arduino iniziata qualche settimana fa con il primo articolo: Tutorial: Motor Shield FE – prima parte.
In queste settimane hai sperimentato come costruirla, testarla e pilotare due motori in CC ( Corrente Continua) ma la motor shield FE può essere utilizzata che per pilotare un motore passo-passo, unipolare o bipolare, e quindi la puoi usare per la tua CNC o stampante 3D autocostruita.
I motori passo-passo bipolari riservano altre modalità di funzionamento, tutte molto interessanti. Se usi la classe Stepper.h di Arduino puoi veramente sbizzarrire la tua fantasia.
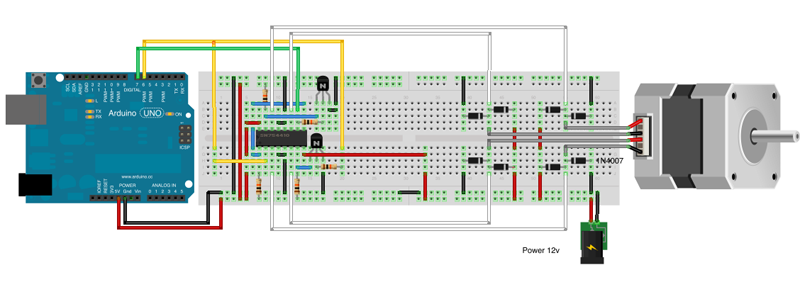
Non inserito il disegno sopra a caso, lo schema che puoi utilizzare per questo esperimento è identico a quello presentato nell’articolo precedente.
Sulla scia delle conoscenze acquisite grazie a Franco, ecco come puoi risparmiare 2 pin di Arduino per pilotare i motori passo-passo bipolari semplicemente aggiungendo all’SN754410NE, due transistor , cinque resistenze e otto diodi.
Riprendo quello che ha scritto Franco in merito a questa configurazione:
Il titolo è volutamente provocatorio, se ti sono piaciuti i miei articoli sui motori passo-passo sarai ancora più interessato a quello che stai per leggere.
Ringrazio da subito il Sig. Franco Da Re, che qualche giorno fa mi ha scritto dopo aver letto questo articolo:
Il tuo esperimento con i motori passo-passo bipolari inizia a diventare interessante, se hai seguito i precedenti articoli avrai realizzato il tuo controllo motore passo-passo bipolare con Arduino e un SN754410NE.
Nella quarta parte hai affrontato il problema della velocità di rotazione ed una prima soluzione per risolvere l’inconveniente dovuto ad una eccessiva velocità di successione dei segnali alle bobine che hanno come effetto collaterale la completa immobilità del motore e l’emissione di un sibilo.
Applica le tue conoscenze al tuo progetto! Se hai letto la prima e la seconda parte di questa serie di articoli avrai certamente raggiunto il livello di conoscenza adeguata alla realizzazione del tuo progetto.
Con due semplici pulsanti puoi far ruotare il motore in senso orario o antiorario fino al raggiungimento del punto desiderato, questo movimento applicato ad esempio ad un ingranaggio che traduce il movimento rotatorio in movimento lineare, ad esempio mediante delle viti trapezie in una cnc, ti consente di posizionare l’utensile della CNC nel punto desiderato.
Oggi ho fatto qualche esperimento con il mio motore bipolare, Arduino e l’SN754410NE, nel precedente articolo: Motori passo-passo bipolari con Arduino – seconda parte hai imparato a pilotare un motore bipolare con Arduino, oggi imparerai come regolarne la velocità.
Nello schema in alto ho rappresentato il collegamento tra Continua a leggere
Nel precedente articolo hai imparato come funziona un motore bipolare, e forse hai già sperimentato lo sketch di esempio con il tuo Arduino.
Lo sketch proposto non è complesso, ripete una sequendi segnali in cui il valore HIGH si sposta lungo i 4 pin a cui è connesso il driver SN754410NE e di conseguenza il motore passo-passo.
Come avrai già letto il driver utilizzato non ha una sua intelligenza specifica, il suo scopo è consentirti di utilizzare tensioni e correnti superiori a quelle gestibili con Arduino e quindi pilotare motori con coppia elevata con Arduino.
Finita la serie di articoli sui Giochi di luce con Arduinoecco un articolo sui motori passo-passo. E’ molto tempo che non mi occupavo di motori passo-passo ed erano rimasti esclusi i motori bipolari.
Iniziamo subito riprendendo un mio precedente articolo in cui hai imparato a riconoscere i motori di tipo passo-passo. Dopo averli riconosciuti avrai letto come pilotare i motori di tipo unipolare, ma se hai riconoscuito che il tuo motore è di tipo bipolare, probabilmete ti sei chiesto … e adesso come lo piloto questo?
Used to monitor number of Google Analytics server requests when using Google Tag Manager
1 minute
_ga_
ID used to identify users
2 years
_gid
ID used to identify users for 24 hours after last activity
24 hours
_ga
ID used to identify users
2 years
_gali
Used by Google Analytics to determine which links on a page are being clicked
30 seconds
__utmv
Contains custom information set by the web developer via the _setCustomVar method in Google Analytics. This cookie is updated every time new data is sent to the Google Analytics server.
2 years after last activity
__utmx
Used to determine whether a user is included in an A / B or Multivariate test.
18 months
__utmc
Used only with old Urchin versions of Google Analytics and not with GA.js. Was used to distinguish between new sessions and visits at the end of a session.
End of session (browser)
__utmz
Contains information about the traffic source or campaign that directed user to the website. The cookie is set when the GA.js javascript is loaded and updated when data is sent to the Google Anaytics server
6 months after last activity
__utmb
Used to distinguish new sessions and visits. This cookie is set when the GA.js javascript library is loaded and there is no existing __utmb cookie. The cookie is updated every time data is sent to the Google Analytics server.
30 minutes after last activity
__utma
ID used to identify users and sessions
2 years after last activity
__utmt
Used to monitor number of Google Analytics server requests
10 minutes
_gac_
Contains information related to marketing campaigns of the user. These are shared with Google AdWords / Google Ads when the Google Ads and Google Analytics accounts are linked together.













 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza