Tag: servomotori
Enrico dopo aver verificato per il suo prototipo di braccio robot il corretto funzionamento ( puoi vedere il risultato in questo articolo ) è passato alla realizzazione dei disegni tecnici.
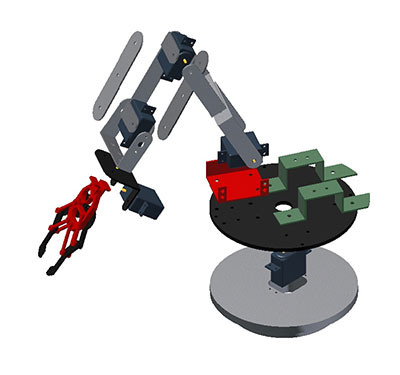
In questa seconda parte potrai trovare i disegni delle parti metalliche realizzati da Enrico e lo schema dei collegamenti tra arduino ed i servo, in un prossimo articolo pubblicherò lo sketch di taratura dei servo per arrivare alla pubblicazione dello sketch finale e del video dimostrativo presentato all’esame di maturità da Enrico. Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/braccio-robot-seconda-parte.html
Analizziamo insieme a Gabriele l’elettronica del suo progetto: Robot hand XBee elettronica.
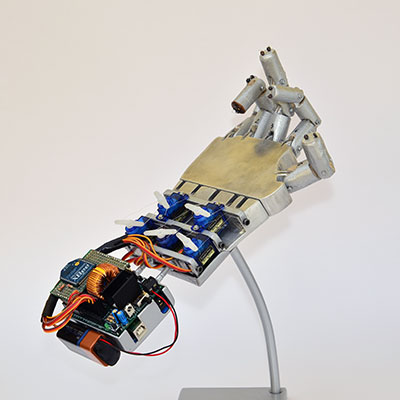
Puoi leggere la prima parte del progetto con le motivazioni ed il principio di funzionamento in questo articolo.
Robot hand XBee elettronica
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/robot-hand-xbee-elettronica-di-gabriele-santin.html
Gabriele Satin ha realizzato il progetto robot hand XBee per l’esame di maturità ed ha voluto condividere il suo sapere e le sue sperimentazioni anche con gli appassionati che ogni giorno leggono il blog.
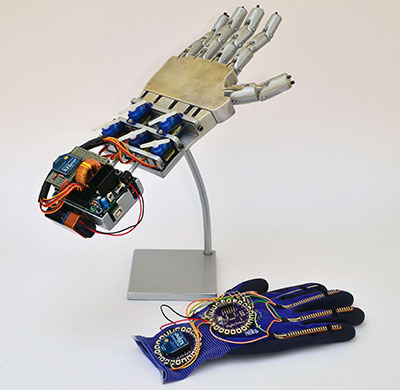
Ringrazio Gabriele per la condivisione della conoscenza e per avermi voluto rendere portavoce del suo progetto.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/robot-hand-xbee-di-gabriele-satin.html
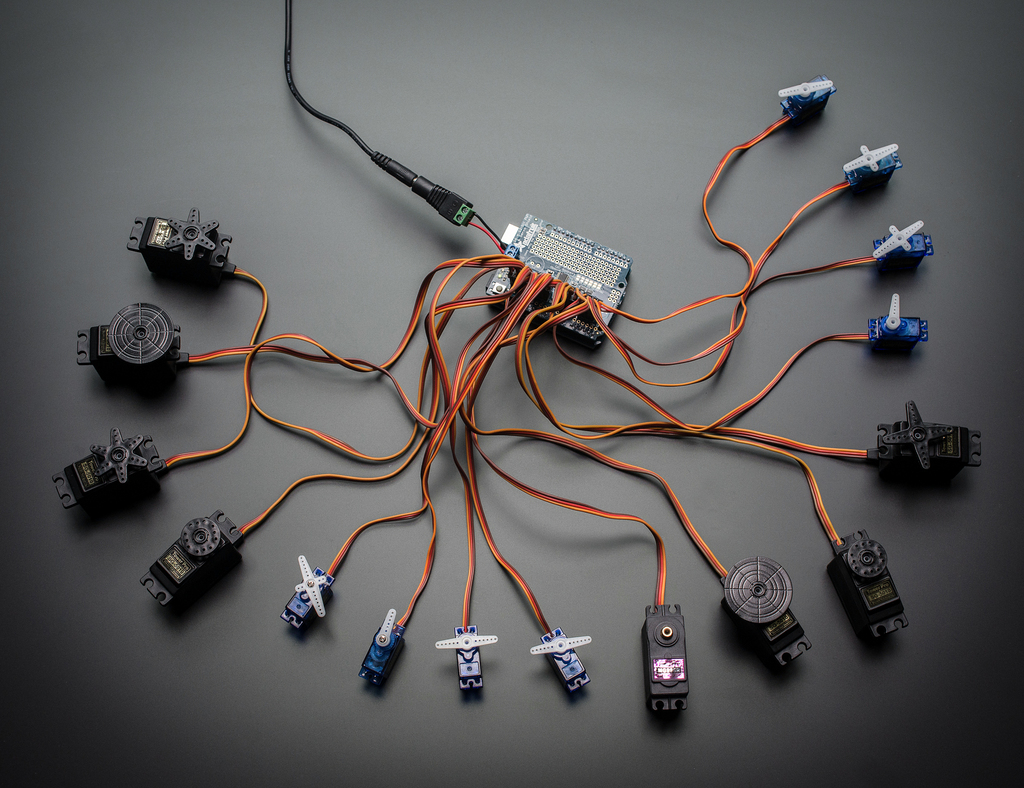
La sevo shield per arduino è una shield in grado di controllare fino a 16 servomotori diversi con soli 2 pin arduino ed il protocollo I2C
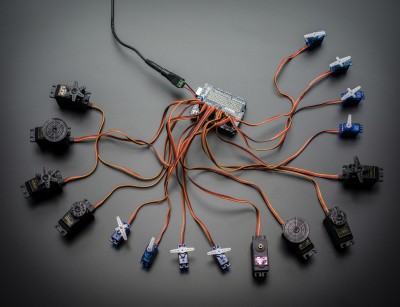
La servo shield è progettata per controllare 16 uscite di tipo PWM, quelle solitamente usate dai servo, ma potresti utilizzare la servo shield per controllare 16 led o 16 driver per led ad alta luminosità da 350mA o 700mA, come quello realizzato dall’amico Luca ( leggi articolo ).
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/servo-shield-arduino.html
Finalmente siamo riusciti ad ottenere il primo movimento della mano bio meccanica, saprai che il progetto a cui sto collaborando è nato dall’idea di Federico che ha anche realizzato un sito su cui pubblichiamo le evoluzioni ed i progressi.

Il montaggio della mano si è rivelato più impegnativo del previsto, sia per la complessità dell’articolazione umana a cui ci siamo ispirati sia per la difficoltà di montaggio dovuta a spazi limitati e meccaniche molto vicine. Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/primo-movimento-della-mano.html
Spesso mi scrivono appassionati che mi chiedono un consiglio sulla scelta del motore in corrente continua, passo passo o servo:

noto sempre una certa confusione e voglio provare a descrivere meglio le caratteristiche di ciascun tipo di motore ed il loro utilizzo.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/motore-corrente-continua.html
Gli esperimenti dedicati alla mano bio meccanica mi hanno portato a ragionare sul servo con movimento armonico e pulsanti per impartire ai servo controllati da arduino un movimento più simile a quello del corpo umano.

Se hai seguito i precedenti articoli sai di cosa sto parlando: l’idea di avvicinare il movimento di una mano robot a quello di una mano umana.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/servo-con-movimento-armonico-e-pulsanti.html
Il progetto mano biomeccanica procede su due fronti: lato software sto lavorando per ottenere sei servo con movimento armonico, cioè tutti i servo devono muoversi ciascuno indipendentemente dagli altri ma con un movimento armonico proprio.

Lato meccanico Federico si sta occupando del montaggio della struttura e dell’automazione con cavi elastici, i tendini, e le minuterie necessarie al completo funzionamento. Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/sei-servo-con-movimento-armonico-arduino.html
Il progetto che ti presento oggi è l’inseguitore solare ossia un dispositivo in grado di simulare il meraviglioso moto che madre natura ha dato al girasole.

A cosa serve?
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/inseguitore-solare-con-arduino.html
In passato hai pilotato i servo per modellisti con Arduino ed uno o più potenziometri, ma potrebbe non essere il metodo migliore per il tuo progetto.

Una prima controindicazione viene dal fatto che un potenziometro potrebbe non essere di tipo lineare ma di tipo logaritmico, per comprendere la differenza ti invito a leggere la pagina di wikipedia relativa: potenziometro.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/tutorial-arduino-i-servo-e-i-pulsanti.html
Cosa puoi fare con un arduino, un nunchuck, due servomotori, del cartone e del nasto adesivo?

Io mi sono divertito a realizzare una simpatica testa robot 🙂 è solo un esempio costruito con un poco tempo del cartone e del nastro adesivo, lo scopo vero di questo articolo è approfondire la comunicazione tra arduino e nunchuck e trasferire il movimento del joystick ai nostri occhietti.
Parti dalla meccanica della nostra testa, procurati una scatolina di cartone e su di un lato attacca un foglio di carta con disegnati i due occhi, sulla base blocca la squadretta del servo con del nastro adesivo:
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/arduino-e-nunchuck-terza-parte.html
Oggi puoi leggere il primo articolo su Nunchuck, Arduino, Servo. Una delle caratteristiche che ha reso famodo Arduino è stata quella di poter facilmente pilotare dei servo per uso modellistico.

E’ infatti possibile pilotare di base fino a 6 servomotori con un arduino uno, duemilanove, mini e similari, ossia quelli basati su Atmega 168 e 328; il numero di porte PWM cresce su arduino mega e similari il cui chip è un atmega 2560.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/arduino-e-nunchuck-prima-parte.html
La curiosità non ha limiti e penso sia alla base della conoscenza. Spesso mi sono posto delle domande tipo Come funziona un servomotore ?

servo smontato
Molti anni fa ho smontato un servomotore per capirne il funzionamento, di quella esperienza non ho conservato foto ma l’obiettivo di comprendere cosa consentisse al servomotore di conoscere la posizione del proprio asse e al contempo conferisse tanta forza all’alberino.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/servo-come-funziona-un-servomotore.html
Continua la serie di Tutorial sui servomotori (articoli precedenti su questo argomento Tutoria Arduino e i servo e Tutorial Arduino e i servo II ) prova a pilotare 6 servomotori:

Nella costruzione di un robot, ad esempio, è necessario che tu sappia pilotare più di un servo contemporaneamente, immagina il sistema di locomozione utilizzato dalla nasa per i rover Sojourner, Pathfinder e Opportunity, tale sistema è denominato Rocker-bogie in cui ciascuna delle 6 ruote necessarie alla locomozione si muove in modo indipendente.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/tutorial-arduino-e-i-servo-iii.html
Nel precedente articolo hai preso confidenza con la classe Servo per pilotare i servo motori ad uso modellistico in tutte le tue applicazioni con Arduino.
In questo articolo vedrai come impartire i comandi di rotazione utilizzando un potenziometro.
 Nello schema in alto puoi osservare come eseguire i collegamenti, il servo è di tipo modellistico funzionante a 4-6v per cui puoi alimentarlo con i +5v di Arduino, se i servo dovessero essere più di uno devi calcolare il loro assorbimento sapendo che Arduino NON è illimitato.
Nello schema in alto puoi osservare come eseguire i collegamenti, il servo è di tipo modellistico funzionante a 4-6v per cui puoi alimentarlo con i +5v di Arduino, se i servo dovessero essere più di uno devi calcolare il loro assorbimento sapendo che Arduino NON è illimitato.
Come potenziometro puoi utilizzarne uno da 10KΩ collegando i pin esterni, quelli ai cui capi misuri una resistenza di 10KΩ indipendentemente dalla rotazione dell’alberino, al positivo (+5v) e al negativo (Gnd) di Arduino.
Non preoccuparti di quale dei terminali colleghi al positivo e quale al negativo, l’importante è che la resistenza misurata tra i due non vari ruotando l’albero del potenziometro.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/tutorial-arduino-servo-2.html
Carica altro










 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza