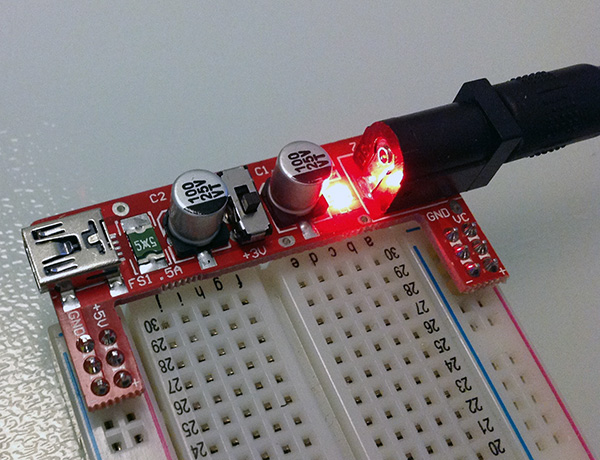
Per progettare con la breadboard trovo davvero utili un 3.3V-5V power supply module che quanche mese fa mi ha mostrato un appassionato arduino.
Ho cercato a lungo il prodotto fino a trovarlo da robotics-3d e nell’ultimo ordine di qulche settimana fa mi sono procurato il 3.3V-5V power supply module. Continua a leggere
Collega il tuo nunchuck ad arduino attraverso l’adattatore della dfrobot e una breadboard, e proviamo uno sketch semplice per verificare di aver collegato tutto in modo corretto.
Prima di tutto collega l’adattatore alla porta del nunchuck, per farlo osserva la posizione dei pin sul connettore del nunchuck, come illustrato nel precedente articolo:
Continuo la mia serie di articoli sulle basi della programmazione con Arduino prendendo spunto da questo articolo direttamente presente sul sito Arduino, che cosa aggiungo la mia personale spiegazione passo passo del codice e qualche consiglio …
In questo articolo realizzeremo un listato per pilotare il nostro motore, nel mio caso i due motori, inviando comandi dalla tastiera del pc, il listato originale è quello riportato sul sito arduino, al quale ho applicato alcune modifiche per pilotare 2 motori e non uno solo, come nell’esempio.
Nel prossimo, ed ultimo, articolo di questa serie ti mostrerò un simpatico video in cui due motori compiono in simultanea dei movimenti in base ad una sequenza di comandi inviati dal pc collegato ad arduino.
Passiamo subito all’analisi del codice che ho modificato per pilotare 2 motori: Continua a leggere
Ed eccoci giunti al primo anello di congiunzione tra mie due passioni, elettronica ed informatica, scriviamo il codice per pilotare i motori passo-passo unipolari.
Non mi dilungherò sull’uso di Arduino e del suo software di programmazione, per queste conoscenze puoi fare riferimento al sito ufficiale ed ai numerosi tutorial, guide ed esempi su come iniziare con questo favoloso strumento.
In questo articolo passiamo alla pratica 🙂 realizziamo il circuito di test.
Inseriamo sulla BreadBoard il nostro integrato ULN2003A come in Figura 1
Figura 1
Affianchiamo Arduino e la BreadBoard in modo da poter facilmente posizionare i fili di collegamento tra le porte 8,9,10 e 11 di arduino ed i terminali 1,2,3 e 4 dell’ULN2003A come visibile in Figura 2
Used to monitor number of Google Analytics server requests when using Google Tag Manager
1 minute
_ga_
ID used to identify users
2 years
_gid
ID used to identify users for 24 hours after last activity
24 hours
_ga
ID used to identify users
2 years
_gali
Used by Google Analytics to determine which links on a page are being clicked
30 seconds
__utmv
Contains custom information set by the web developer via the _setCustomVar method in Google Analytics. This cookie is updated every time new data is sent to the Google Analytics server.
2 years after last activity
__utmx
Used to determine whether a user is included in an A / B or Multivariate test.
18 months
__utmc
Used only with old Urchin versions of Google Analytics and not with GA.js. Was used to distinguish between new sessions and visits at the end of a session.
End of session (browser)
__utmz
Contains information about the traffic source or campaign that directed user to the website. The cookie is set when the GA.js javascript is loaded and updated when data is sent to the Google Anaytics server
6 months after last activity
__utmb
Used to distinguish new sessions and visits. This cookie is set when the GA.js javascript library is loaded and there is no existing __utmb cookie. The cookie is updated every time data is sent to the Google Analytics server.
30 minutes after last activity
__utma
ID used to identify users and sessions
2 years after last activity
__utmt
Used to monitor number of Google Analytics server requests
10 minutes
_gac_
Contains information related to marketing campaigns of the user. These are shared with Google AdWords / Google Ads when the Google Ads and Google Analytics accounts are linked together.






 uno o più motori passo-passo , io ho utilizzato i MINIBEA CO., LTD da 200passi e 0,44A
uno o più motori passo-passo , io ho utilizzato i MINIBEA CO., LTD da 200passi e 0,44A
 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza