Ieri ho dato libero sfogo alla fantasia ed alle conoscenze su Arduino ed ho montato il mio castello di shield per realizzare un data logging con Arduino Il progetto in se non è complesso a …
La descrizione del Christmas Tree Neopixel sketch continua con l’analisi delle altre funzioni. Lo sketch analizzato è quello presente tra gli esempi della libreria Adafruit Neopixel e già mostrato nel precedente articolo. Trovi lo sketch intero …
Nei giorni scorsi mi è stato consegnato il Tinker Kit MicroBit creato da ElecFreaks. Da qualche tempo sto sperimentando con la board Micro:bit ed il suo IDE online dotato anche di simulatore, puoi leggere qualcuno dei precedenti …
Raspberry Pi 3 è arrivata finalmente in mio possesso ed è pronta per essere utilizzata in molti progetti. qualche giorno fa sono stato contattato dalla www.kubii.it interessati a fornirmi una Raspberri Pi 3 a titolo di partenariato e …
Come promesso nel mio precedente articolo ho inizia con questo una serie di articoli dedicati alla costruzione del mio inseguitore solare. Qualche anno fa in una fiera di settore ho acquistato per pochi euro un …
Continua la serie di articoli su come utilizzare la “Motor Shield Fe” ed Arduino iniziata qualche settimana fa con il primo articolo: Tutorial: Motor Shield FE – prima parte. In queste settimane hai sperimentato come …
Se sei un appassionato arduino, e non solo, hai senza dubbio realizzato un tuo progetto e forse hai voglia di condividere il tuo progetto con altri appassionati, questo è quello che è successo a Gabriele che …
Se hai letto il precedente articolo sulla centralina meteo arduino yùn sarai curioso di conoscere lo sketch per realizzare la tua centralina. La realizzazione della centralina meteo arduino necessita sia dello sketch sia del codice …
ArduPower è un progetto di Alberto Panu il cui scopo è consentirti di controllare 6 prese elettriche a 220v pilotate da remoto, via telnet. Alberto è un grande appassionato di tecnologia, arduino e sicuramente un …
Prima di incidere un oggetto con l’iModela è necessario eseguire il piano, ossia creare una superficie in bolla ripetto alla fresa. Questa operazione evita che alcune tracce siano ben incise ed altre appena accennate od …
Scopri come collegare la Motor Shield ad Arduino, e far muovere due motori in corrente continua con un semplice sketch.
Un video dice più di mille parole, puoi seguirlo per collegare prima l’alimentazione, poi i due motori ed infine l’Arduino al computer. Continua a leggere
Collega il tuo nunchuck ad arduino attraverso l’adattatore della dfrobot e una breadboard, e proviamo uno sketch semplice per verificare di aver collegato tutto in modo corretto.
Prima di tutto collega l’adattatore alla porta del nunchuck, per farlo osserva la posizione dei pin sul connettore del nunchuck, come illustrato nel precedente articolo:
Ho letto un interessante articolo sulleperformance dei nuovi HardDisco allo stato solido ( SDD ) e mi ha incuriosito al punto da volerne provare uno sul mio MacBook.
In particolare un articolo diceva pressappoco così:
Dopo aver assemblato la Motor Shield FE, è l’ora di iniziare ad utilizzarla e per farlo è necessario che ti sia chiaro a cosa servono i jumper su di essa e come utilizzarli per evitare sia di danneggiare la scheda, ma sopratutto di danneggiare il computer o Arduino.
Oggi puoi leggere il primo articolo su Nunchuck, Arduino, Servo. Una delle caratteristiche che ha reso famodo Arduino è stata quella di poter facilmente pilotare dei servo per uso modellistico.
E’ infatti possibile pilotare di base fino a 6 servomotori con un arduino uno, duemilanove, mini e similari, ossia quelli basati su Atmega 168 e 328; il numero di porte PWM cresce su arduino mega e similari il cui chip è un atmega 2560.
Venerdì 17 porta sfiga ? Io dico di no, venerdì scorso il 17 febbraio 2012 ha portato futuro, innovazione e collaborazione.
Se leggi questo blog da qualche tempo sai quanto Arduino sia parte importante dei miei esperimenti, ma sopratutto sai che, come a te, mi piace la condivisione delle idee.
Qualche giorno fa mi sono arrivate alcune shield Arduino. Tra questi la Motor Shield FE una cheda con cui puoi pilotare sia motori in corrente continua sia motori passo-passo.
In questo articolo potrai legger passo passo come assemblarla, l’unico componente per il quale devi avere una maggiore attenzione è l’integrato L298, in quanto smd.
Il 30 novembre 2010 è stato rilasciato il nuovo IDE 1.0 per programmare Arduino. Da allora sono passati alcuni mesi e forse lo hai già provato sul tuo computer.
E’ possibile che tu sia riuscito già a installarlo su Windows 7, in tal caso questa guida non ti serve, ma se non ci fossi riuscito o volessi controllare di averlo installato correttamente sei nel posto giusto.
I motori passo-passo bipolari riservano altre modalità di funzionamento, tutte molto interessanti. Se usi la classe Stepper.h di Arduino puoi veramente sbizzarrire la tua fantasia.
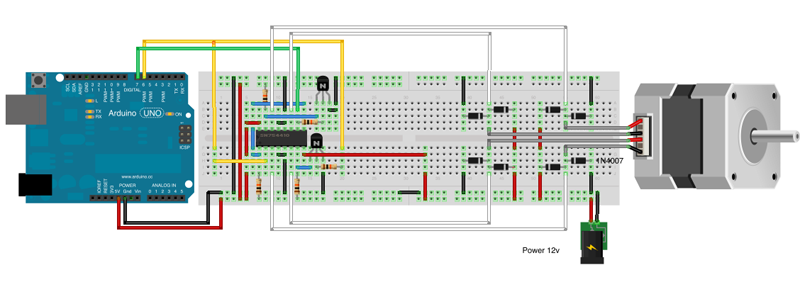
Non inserito il disegno sopra a caso, lo schema che puoi utilizzare per questo esperimento è identico a quello presentato nell’articolo precedente.
Creare il tuo repository yum ha dei vantaggi oggettivi sopratutto se devi installare e aggiornare molti server linux e vuoi essere certo che anche a mesi di distanza l’aggiornamento avvenga con gli stessi pacchetti.
Il problema che più spesso incontro con l’attività di installazione di molti server, sul medesimo hardware è che tra una installazione e la successiva le versioni dei pacchetti di upgrade sono differenti, questo causa un disallineamento tra una installazione e la successiva.
Sulla scia delle conoscenze acquisite grazie a Franco, ecco come puoi risparmiare 2 pin di Arduino per pilotare i motori passo-passo bipolari semplicemente aggiungendo all’SN754410NE, due transistor , cinque resistenze e otto diodi.
Riprendo quello che ha scritto Franco in merito a questa configurazione:
Si, è proprio quello che penso, collaborare è un ottimo modo per aiutare noi stessi e gli altri. Quando ho deciso di aprire questo blog l’ho fatto con il chiaro intento di pubblicare degli articoli su alcune mie passioni e condividere le mie conoscenze con altri.
Dal primo articolo pubblicato sono passati 10 mesi e sono nate numerose collaborazioni, tantissimi contributi e richieste, a cui ho cercato di dare risposta con la passione, cercando di non deludere nessuno.
Il titolo è volutamente provocatorio, se ti sono piaciuti i miei articoli sui motori passo-passo sarai ancora più interessato a quello che stai per leggere.
Ringrazio da subito il Sig. Franco Da Re, che qualche giorno fa mi ha scritto dopo aver letto questo articolo:
Il tuo esperimento con i motori passo-passo bipolari inizia a diventare interessante, se hai seguito i precedenti articoli avrai realizzato il tuo controllo motore passo-passo bipolare con Arduino e un SN754410NE.
Nella quarta parte hai affrontato il problema della velocità di rotazione ed una prima soluzione per risolvere l’inconveniente dovuto ad una eccessiva velocità di successione dei segnali alle bobine che hanno come effetto collaterale la completa immobilità del motore e l’emissione di un sibilo.
In questi giorni ho fatto numerosi esperimenti con i motori passo-passo bipolari per porter scrivere nuovi articoli e sto preparando una sorpresa che, spero, troverai interessante.
In questo articolo prendo spunto dal commento alla terza parte di questa serie di articoli da parte di un appassionato come te e me. Il problema di cui mi ha reso partecipe è che collegando il motore e caricato lo sketch esso emette un sibilo e non si muove.
Used to monitor number of Google Analytics server requests when using Google Tag Manager
1 minute
_ga_
ID used to identify users
2 years
_gid
ID used to identify users for 24 hours after last activity
24 hours
_ga
ID used to identify users
2 years
_gali
Used by Google Analytics to determine which links on a page are being clicked
30 seconds
__utmv
Contains custom information set by the web developer via the _setCustomVar method in Google Analytics. This cookie is updated every time new data is sent to the Google Analytics server.
2 years after last activity
__utmx
Used to determine whether a user is included in an A / B or Multivariate test.
18 months
__utmc
Used only with old Urchin versions of Google Analytics and not with GA.js. Was used to distinguish between new sessions and visits at the end of a session.
End of session (browser)
__utmz
Contains information about the traffic source or campaign that directed user to the website. The cookie is set when the GA.js javascript is loaded and updated when data is sent to the Google Anaytics server
6 months after last activity
__utmb
Used to distinguish new sessions and visits. This cookie is set when the GA.js javascript library is loaded and there is no existing __utmb cookie. The cookie is updated every time data is sent to the Google Analytics server.
30 minutes after last activity
__utma
ID used to identify users and sessions
2 years after last activity
__utmt
Used to monitor number of Google Analytics server requests
10 minutes
_gac_
Contains information related to marketing campaigns of the user. These are shared with Google AdWords / Google Ads when the Google Ads and Google Analytics accounts are linked together.















 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza