
Enrico dopo aver verificato per il suo prototipo di braccio robot il corretto funzionamento ( puoi vedere il risultato in questo articolo ) è passato alla realizzazione dei disegni tecnici.
In questa seconda parte potrai trovare i disegni delle parti metalliche realizzati da Enrico e lo schema dei collegamenti tra arduino ed i servo, in un prossimo articolo pubblicherò lo sketch di taratura dei servo per arrivare alla pubblicazione dello sketch finale e del video dimostrativo presentato all’esame di maturità da Enrico.
Il progetto del braccio robot
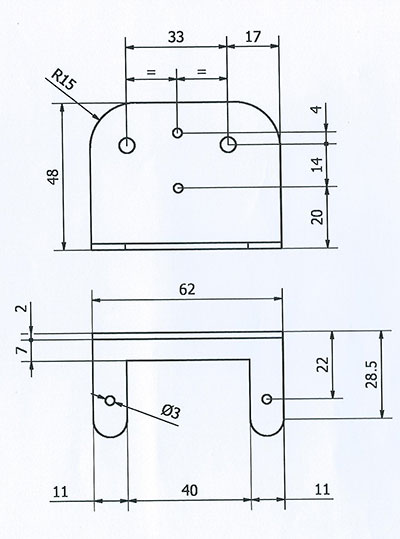
Enrico ha realizzato alcuni disegni accurati delle staffe e barre da realizzare al taglio laser e con l’aiuto di piegatrici.
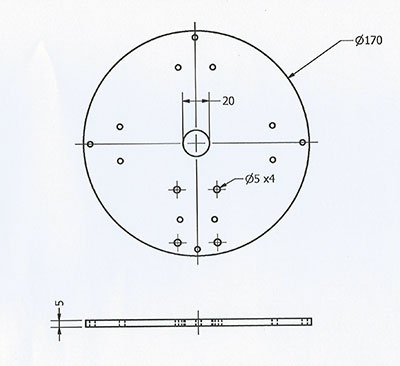
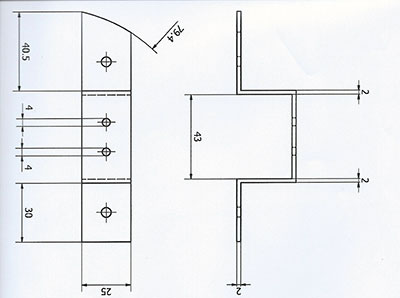
I disegni, con cui puoi riprodurre il progetto, partendo dalla base:
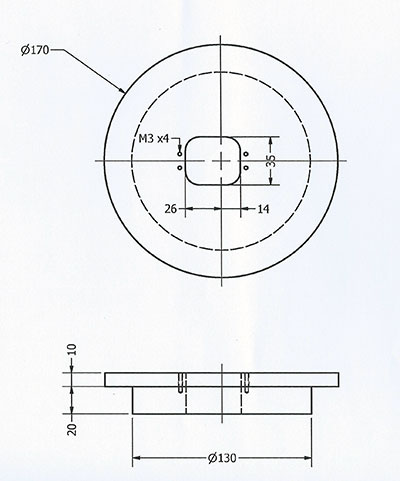
al supporto rotante superiore:
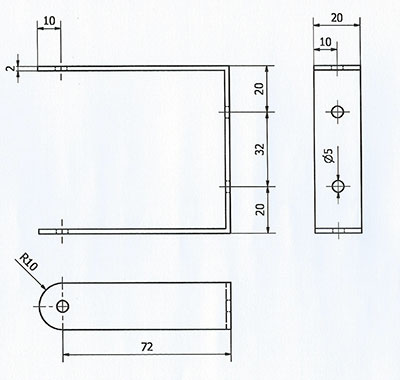
la staffa di supporto al servo connesso alla base rotante:
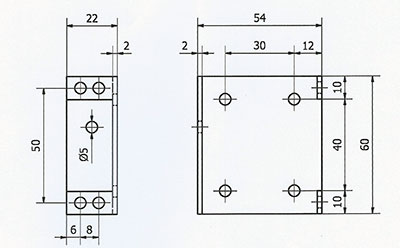
e le due staffe per l’elettronica:
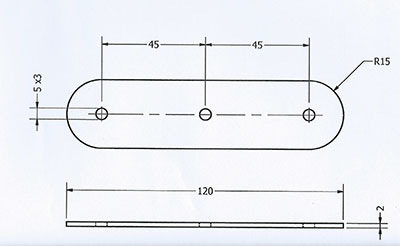
le staffe che compongono il braccio:
e quelle dell’avambraccio:
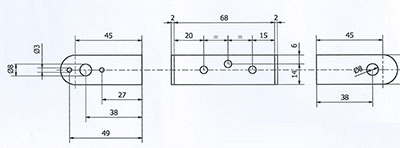
fino ad arrivare al polso:
La mano del progetto
come ogni braccio che si rispetti la mano è una cosa molto importante 🙂 ed Enrico non si è fatto sfuggire l’opportunità di acquistarne una davvero ben fatta:

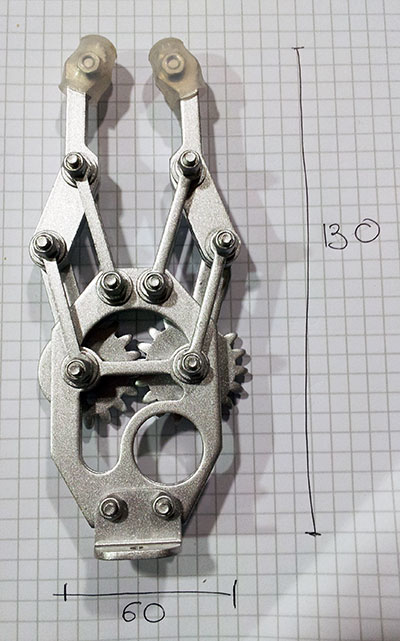
sulla base della quale ha realizzato le staffe per il polso del suo progetto:

Montaggio
Enrico ha voluto condividere anche alcune foto del montaggio in cui mostra la precisione e la sistemazione dei cavi perché non ti diano fastidio in fase di movimentazione:

o più in generale il montaggio del braccio e dell’avambraccio:
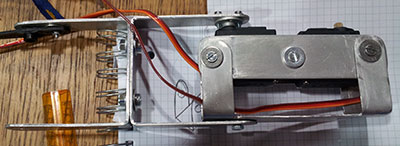
oltre ai particolari di montaggio delle staffe:


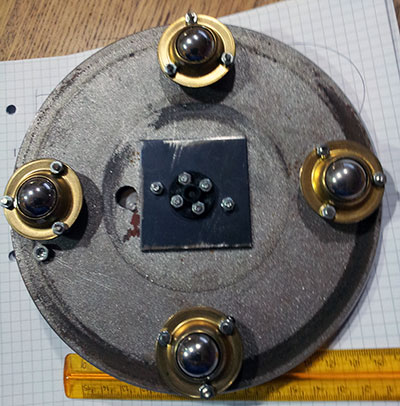
o delle ruote alla base girevole del braccio:
Lo schema elettrico e la realizzazione e la basetta millefori
Ecco lo schema dei collegamenti realizzato per il progetto:
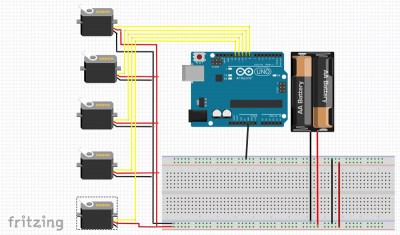
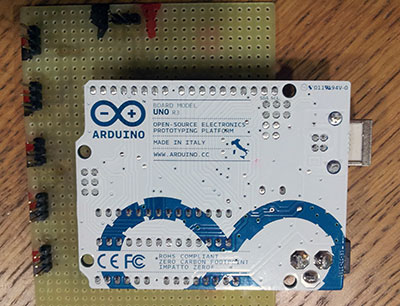
da cui puoi realizzare la basetta elettronica su millefori:
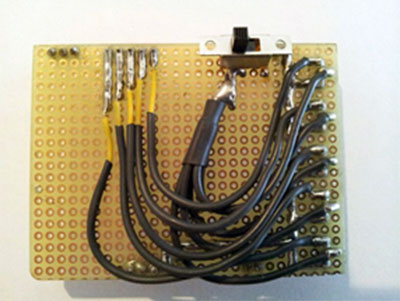
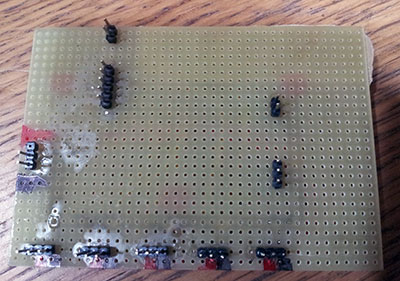
da collegare ad arduino per il controllo dei servo:
Buona realizzazione !!!

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
11 commenti
1 ping
Vai al modulo dei commenti
Ciao a tutti. Volevo precisare una cosa (per agevolare e aiutare tutti), l’idea iniziale era quella di usare taglio laser e piegatrici per realizzare tutti i vari pezzi ma poi con le innumerevoli modifiche è diventato impossibile perciò sono passato ad attrezzature molto più semplici….. flessibile, trapano, morsa e martello. Buon lavoro
Autore
Grazie per la precisazione Enrico 🙂
Ciao Enrico, per prima cosa complimenti per il progetto ! siamo due ragazzi che hanno la maturità quest’anno, un elettronico e un meccanico. Siamo interessati alla realizzazione del braccio, riusciresti a darci la tua email in modo tale da poterti contattare ??
grazie in anticipo
Autore
Ciao Tommaso,
tutto quello che vi occorre è sul blog e se siete un meccanico ed un elettronico sono certo che saprete meglio di me cosa e come farlo.
Se avete dubbi sull’articolo o su qualche componente potete utilizzare i commenti del blog ed io posso provare a risponderVi.
Ricordate che:
– è vietato incollare codice nei comemnti;
– non correggo sketch degli esami di maturità e di progetti commerciali;
– vi darò tutto l’aiuto che vi serve se dimostrerete di aver letto e capito quello che ho scritto prima di porre una domanda.
se possibile gradirei sapere sapere dove e stata acquistata la mano del progetto
grazie
Autore
Ciao Fernando,
se leggi bene l’articolo scoprirai che la mano è stata costruita da Enrico che ha anche rilasciato tutti i progetti per ricostruirla.
Scusa ma nel progetto dice che Enrico ne ha acquistata una pronta e ben fatta.!
Autore
Ciao Pietro,
ti riferisci alla pinza/mano, giusto?
Qual’è la domanda?
Ciao Mauro, è davvero un ottimo progetto ma nel disegno della base non riesco a capire la posizione dei fori per via delle mancanze di quote, se possibile potresti o metterle oppure spiegarmi dove sono collocati di preciso.
Grazie in anticipo
Autore
Ciao Kira,
lascio il commento online perché Enrico possa aiutarti.
va benissimo grazie mille, attendo risposta
[…] Braccio robot di Franceschetti Enrico – seconda parte […]