Venerdì 17 porta sfiga ? Io dico di no, venerdì scorso il 17 febbraio 2012 ha portato futuro, innovazione e collaborazione.
Se leggi questo blog da qualche tempo sai quanto Arduino sia parte importante dei miei esperimenti, ma sopratutto sai che, come a te, mi piace la condivisione delle idee.
Qualche giorno fa mi sono arrivate alcune shield Arduino. Tra questi la Motor Shield FE una cheda con cui puoi pilotare sia motori in corrente continua sia motori passo-passo.
In questo articolo potrai legger passo passo come assemblarla, l’unico componente per il quale devi avere una maggiore attenzione è l’integrato L298, in quanto smd.
I motori passo-passo bipolari riservano altre modalità di funzionamento, tutte molto interessanti. Se usi la classe Stepper.h di Arduino puoi veramente sbizzarrire la tua fantasia.
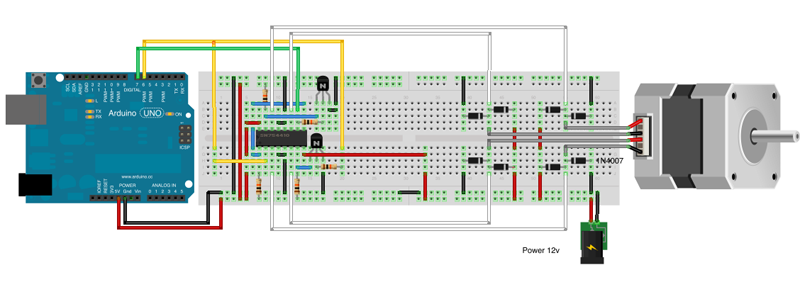
Non inserito il disegno sopra a caso, lo schema che puoi utilizzare per questo esperimento è identico a quello presentato nell’articolo precedente.
Sulla scia delle conoscenze acquisite grazie a Franco, ecco come puoi risparmiare 2 pin di Arduino per pilotare i motori passo-passo bipolari semplicemente aggiungendo all’SN754410NE, due transistor , cinque resistenze e otto diodi.
Riprendo quello che ha scritto Franco in merito a questa configurazione:
Si, è proprio quello che penso, collaborare è un ottimo modo per aiutare noi stessi e gli altri. Quando ho deciso di aprire questo blog l’ho fatto con il chiaro intento di pubblicare degli articoli su alcune mie passioni e condividere le mie conoscenze con altri.
Dal primo articolo pubblicato sono passati 10 mesi e sono nate numerose collaborazioni, tantissimi contributi e richieste, a cui ho cercato di dare risposta con la passione, cercando di non deludere nessuno.
Il titolo è volutamente provocatorio, se ti sono piaciuti i miei articoli sui motori passo-passo sarai ancora più interessato a quello che stai per leggere.
Ringrazio da subito il Sig. Franco Da Re, che qualche giorno fa mi ha scritto dopo aver letto questo articolo:
Tra i progetti presenti sul web è senza dubbio uno di più interesanti a mio avviso. Molti utenti leggendo i miei articoli sui motori passo passo hanno scritto chiedendomi come realizzare un Dolly Project.
Navigando in rete c’è tantissimo materiale a riguardo e da ignorante in materia mi sono documentato per capire di cosa si trattasse e cosa fosse un Dolly Project.
Applica le tue conoscenze al tuo progetto! Se hai letto la prima e la seconda parte di questa serie di articoli avrai certamente raggiunto il livello di conoscenza adeguata alla realizzazione del tuo progetto.
Con due semplici pulsanti puoi far ruotare il motore in senso orario o antiorario fino al raggiungimento del punto desiderato, questo movimento applicato ad esempio ad un ingranaggio che traduce il movimento rotatorio in movimento lineare, ad esempio mediante delle viti trapezie in una cnc, ti consente di posizionare l’utensile della CNC nel punto desiderato.
Pilota un motore passo-passo con due interruttori. Nei precedenti articoli hai imparato a collegare e regolare la velocità di un motore passo-passo bipolare con Arduino.
Oggi ti spingerai un po’ oltre iniziando a collegare dei pulsanti ad Arduino e utilizzandoli per posizionare l’albero del motore dove lo riterrai più opportuno.
Probabilmente hai già installato il software Arduino 1.0 sul tuo Mac OS X Lion, e collagato Arduino alla porta Usb per iniziare subito a provare il tuo nuovo acquisto.
Probabilmente ti sei accorto che Mac OS X non riconosce la scheda Arduino e ti propone la selezione delle sole porte USB Bluethoot.
Oggi ho fatto qualche esperimento con il mio motore bipolare, Arduino e l’SN754410NE, nel precedente articolo: Motori passo-passo bipolari con Arduino – seconda parte hai imparato a pilotare un motore bipolare con Arduino, oggi imparerai come regolarne la velocità.
Nello schema in alto ho rappresentato il collegamento tra Continua a leggere
Nel precedente articolo hai imparato come funziona un motore bipolare, e forse hai già sperimentato lo sketch di esempio con il tuo Arduino.
Lo sketch proposto non è complesso, ripete una sequendi segnali in cui il valore HIGH si sposta lungo i 4 pin a cui è connesso il driver SN754410NE e di conseguenza il motore passo-passo.
Come avrai già letto il driver utilizzato non ha una sua intelligenza specifica, il suo scopo è consentirti di utilizzare tensioni e correnti superiori a quelle gestibili con Arduino e quindi pilotare motori con coppia elevata con Arduino.
Buona Epifania a tutti, oggi concludiamo questa serie di articoli dedicati alle luci di Natale con il nono gioco.
Forse avrai tirato un sospiro di sollievo per la fine di questi articoli, oppure sei tra coloro che mi hanno scritto in questo periodo natalizio per ringraziarmi, in ogni caso, anche se questa serie di articoli non ha suscitato in te molto interesse hai avuto modo, leggendoli, di apprendere numerosi giochi di calcolo e tecniche di programmazione che potrai ritrovare utili per i tuoi lavori.
Continua la serie dei miei articoli sui giochi di luce per il tuo albero o per le decorazioni Natalizie.
In questo articolo realizzerai un secondo gioco di luce e una importante modifica che ti permetterà di selezionare i quale gioco eseguire.
Riporto tutto lo sketch evidenziando i punti e spiagando quali sono le modifiche che puoi realizzare e lo scopo di ciascuna modifica. Ho anche modificato il numero di pin utilizzabili per i giochi dovendone utilizzare 1 ( il pin 13) per eseguire la scelta del gioco.
In pratica il pin 13 è utilizzato come INPUT digitale che commutato a +5v indica allo sketch la tua volontà di cambiare gioco di luci. Passiamo allo sketch: Continua a leggere
Continuo il filone feste di Natale con questo primo semplice gioco di luci per il tuo albero di natale o presepe. Nei prossimi articoli troverai degli esempi differenti di giochi natalizi e chissà che non possa realizzare dei giochi di luce radiocomandati 🙂
Ti mostro un semplice sketch lasciando a te la possibilità di definire sia che tipo di luci utilizzare, magari riciclando delle vecchie serie di luci oramai in disuso perchè statiche, o realizando delle serie con i led.
Used to monitor number of Google Analytics server requests when using Google Tag Manager
1 minute
_ga_
ID used to identify users
2 years
_gid
ID used to identify users for 24 hours after last activity
24 hours
_ga
ID used to identify users
2 years
_gali
Used by Google Analytics to determine which links on a page are being clicked
30 seconds
__utmv
Contains custom information set by the web developer via the _setCustomVar method in Google Analytics. This cookie is updated every time new data is sent to the Google Analytics server.
2 years after last activity
__utmx
Used to determine whether a user is included in an A / B or Multivariate test.
18 months
__utmc
Used only with old Urchin versions of Google Analytics and not with GA.js. Was used to distinguish between new sessions and visits at the end of a session.
End of session (browser)
__utmz
Contains information about the traffic source or campaign that directed user to the website. The cookie is set when the GA.js javascript is loaded and updated when data is sent to the Google Anaytics server
6 months after last activity
__utmb
Used to distinguish new sessions and visits. This cookie is set when the GA.js javascript library is loaded and there is no existing __utmb cookie. The cookie is updated every time data is sent to the Google Analytics server.
30 minutes after last activity
__utma
ID used to identify users and sessions
2 years after last activity
__utmt
Used to monitor number of Google Analytics server requests
10 minutes
_gac_
Contains information related to marketing campaigns of the user. These are shared with Google AdWords / Google Ads when the Google Ads and Google Analytics accounts are linked together.














 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza