
Assembla HBR robot lasercut ti mostra, con un video, le fasi di assemblaggio del robot partendo dalla struttura tagliata a laser.
Ti potrebbero essere utili gli articoli dedicati a: Continua a leggere
Giu 16
Assembla HBR robot lasercut ti mostra, con un video, le fasi di assemblaggio del robot partendo dalla struttura tagliata a laser.
Ti potrebbero essere utili gli articoli dedicati a: Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/assembla-hbr-robot-lasercut.html
Giu 07
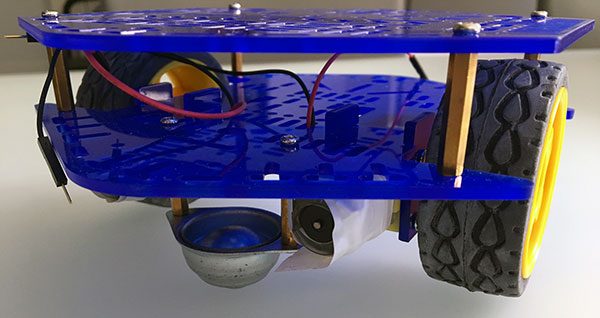
HBR robot lasercut è il mio personale primo contributo alla community HotBlack Robotics

Partendo dai files STL condivisi per la realizzazione del DotBot ho deciso di ricavare i files per la laser cut. Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/hbr-robot-lasercut.html
Mag 24
Install ROS on RaspBian ti è utile se desideri installare ROS ( Robotic Operating System ) su una distribuzione standard per Raspberry Pi come Raspbian.
Indubbio l’interesse ed il legame tra Install ROS on RaspBian e l’articolo “HotBalck Robotics” sopratutto perchè per l’installazione puoi seguire il loro ben fatto tutorial installiamo ros su raspbian Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/install-ros-on-raspbian.html
Mag 19
HotBlack Robotics ed il cloud robotics computing sono stati oggetto del workshop a cui ho partecipato lo scorso sabato c/o WeMake.

Il workshop presentato da Ludovico e Gabriele che con Michele Maffucci, stimato collega blogger, hanno messo il loro sapere nella realizzazione di ua piattaforma di cloud robotics.
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/hotblack-robotics.html
Nov 21
Sulla scia della partecipazione a Robotica 2011, in una delle conferenze che precedevano quella di Massimo Banzi, ho appreso l’esistenza di un sistema opertivo open-source per robot: ROS (Robot Operating System)
") ROS è un vero e proprio sistema open-source, rilasciato sotyto licenza BSD, che mette a disposizione di chiunque sia interessato alla realizzazione di un robot le librerie, gli strumenti e il substrato software su cui sviluppare le funzionalità che intendi dare al tuo robot.
ROS è un vero e proprio sistema open-source, rilasciato sotyto licenza BSD, che mette a disposizione di chiunque sia interessato alla realizzazione di un robot le librerie, gli strumenti e il substrato software su cui sviluppare le funzionalità che intendi dare al tuo robot.
Come seguace della filosofia open-source e appassionato di elettronica, informatica e bricolage la robotica è a un passo brevissimo, e incuriosito ho visitato il sito ufficiale.
Permalink link a questo articolo: https://www.mauroalfieri.it/informatica/robotica-ros-il-sistema-operativo-per-robot-open-source.html

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza Creative Commons Attribution Non commercial Share Alike 4.0 International
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza Creative Commons Attribution Non commercial Share Alike 4.0 International