
Install ROS on RaspBian ti è utile se desideri installare ROS ( Robotic Operating System ) su una distribuzione standard per Raspberry Pi come Raspbian.
Indubbio l’interesse ed il legame tra Install ROS on RaspBian e l’articolo “HotBalck Robotics” sopratutto perchè per l’installazione puoi seguire il loro ben fatto tutorial installiamo ros su raspbian
Iniziamo la procedure di install ROS on RaspBian
Il primo passo è ottenere una microSD con l’immagine Raspbian installata.
Puoi seguire questo tutorial di qualche anno fa, ricorda di utilizzare l’ultima versione disponibile sul sito ufficiale RPi.
Primo passo: trova la tua raspberry dopo averla connessa in rete.
Per farlo io utilizzo il comando nmap come vedi di seguito:
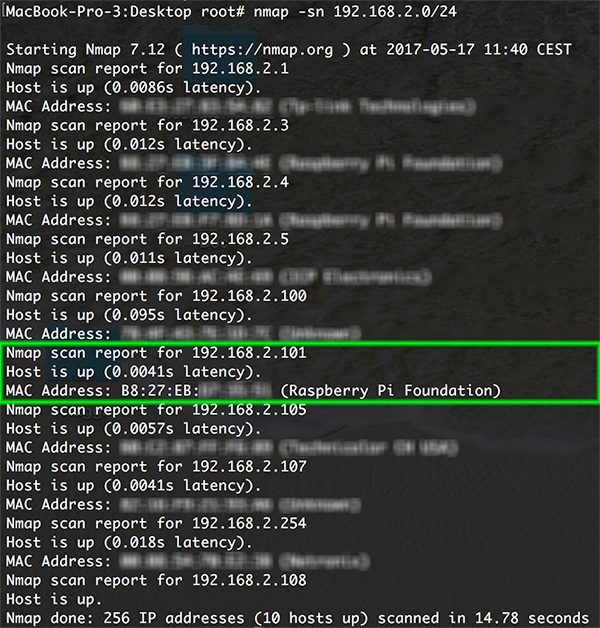
i parametri indicano l’intera rete da scansire 192.168.2.0/24 ed il risultato mostra chiaramente la Raspberry Pi, l’ho evidenziato in verde.
Collegati alla tua raspberry via ssh sull’indirizzo trovato, nel mio esempio: 192.168.2.101, ed esegui: “sudo apt-get update”:
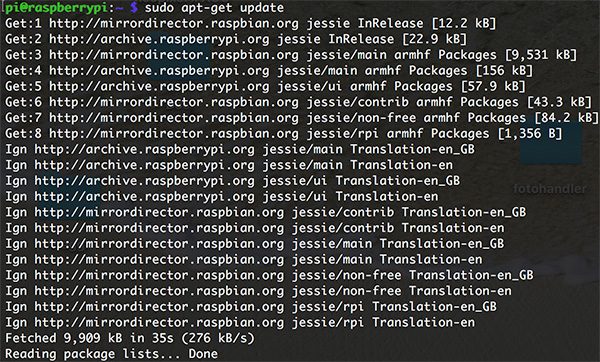
e subito dopo lancia un “sudo apt-get upgrade”:
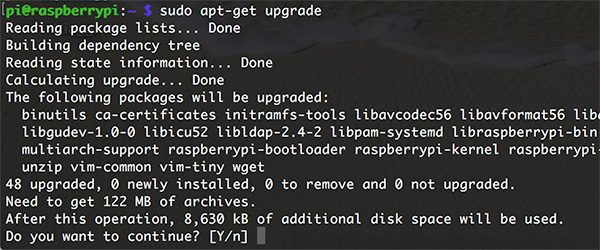
ed al termine:
sarai pronto per l’install ROS on Raspbian.
Lancia i comandi come descritto nel tutorial della HotBlack Robotics:
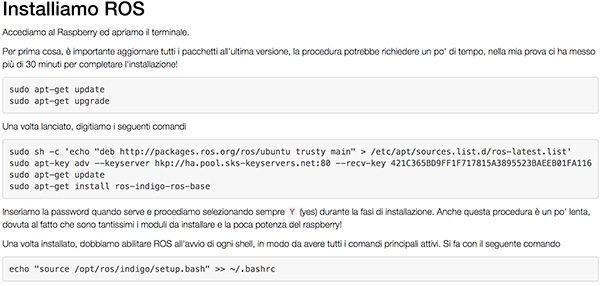
lancia in sequenza i comandi per aggiungere il repository ROS:

e quindi l’install ROS on Raspbian via apt-get install ros-indigo-ros-base
al termine dell’installazione di ROS, conclusasi senza errori:
potrai inserire nel ~/.bashrc la linea che richiamerà il setup.bash:

ed eseguire il reboot della Raspberry Pi 3 per rendere attive le modifiche.
Installazione di TurtleSim
come puoi leggere sul tutorial della HBR, TurtleSim è un modulo ROS:
che puoi installare con un semplice apt-get install come mostrato di seguito:
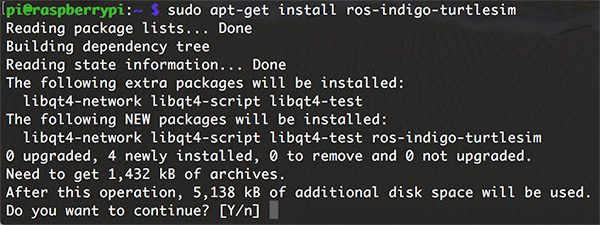
al termine dell’installazione il modulo sarà pronto per essere utilizzato e per testare la tua installazione.
Nei prossimi articoli leggerai come eseguire dei semplici esperimenti con ROS su Raspbian e cecheremo di controllare la TurtleSim da remoto.
In attesa puoi seguire i tutoral, come questo, pubblicati sul supporto della Cloud Robotics di HotBlack

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza