
Robot arm 3D printed è un progetto a cui ho lavorato in questo mese di assenza, in termini di post, sul blog.

Da anni avrei voluto realizzare un progetto di braccio robot che potesse essere composto in due parti:
- braccio robot mosso da servocomandi
- controller con potenziometri
quest’ultimo è realizzato con forme simili al braccio e serve per “insegnare” al robot come muoversi ed afferrare gli oggetti.
Cobot o co-robot
I cobot o co-robot sono sempre più attuali e gli studi in tale direzione, da parte della robotica industriale e non solo, sono sempre maggiori.
Wikipedia riporta la loro definizone come:
e se hai seguito uno dei miei corso base Arduino avrai certamente visto uno dei primi progetti che, qualche anno fa, ho trovato in internet realizzati da un maker:
in cui un semplice robot viene istruito ad eseguire dei movimenti semplici attraverso un “controller” realizzato con dei potenziometri.
Robot arm 3D printed
la realizzazione di un intero robot arm 3D printed potrebbe risultare difficile partendo da zero, per cui ho cercato on-line un progetto condiviso:
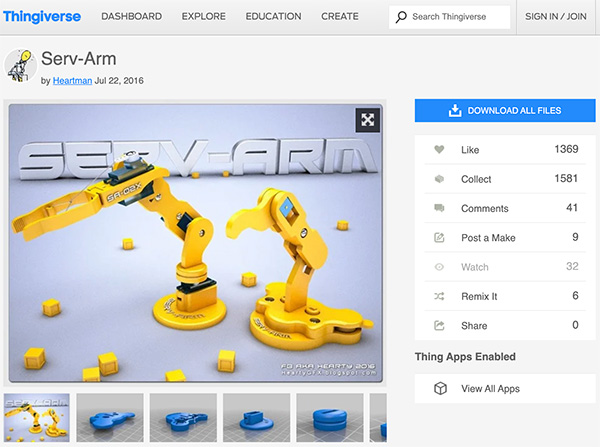
a cui, come sai che faccio di solito, ho apportato le mie modifiche.
Pubblicherò il mio progetto su thingiverse alla fine di questa serie di articoli.
In questo primo articolo introduttivo leggi quelle che saranno gli step da seguire per la realizzazione del robot arm 3D printed.
Potrai decidere se realizzare la parte di stampa 3D e sketch come pubblicato da Heartman nel suo progetto o realizzare la mia versione.
Step per la realizzazione del robot arm 3D printed
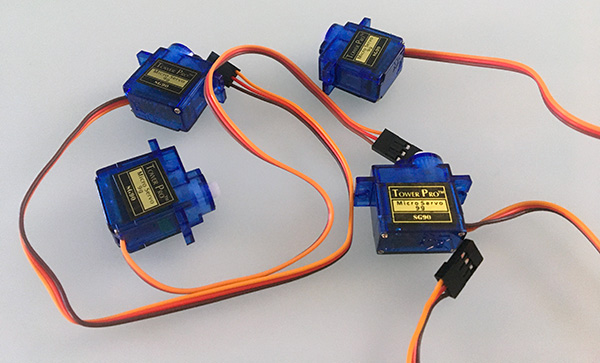
Il primo passo è scegliere i componenti, iniziamo dalla parte robot arm, ossia quella che si muoverà, io ho scelto di non modificarla e quindi ho acquistato 4 servo motor delle dimensioni adatte al progetto:
poi ho stampato tutte le parti necessarie alla costruzione del braccio robot:
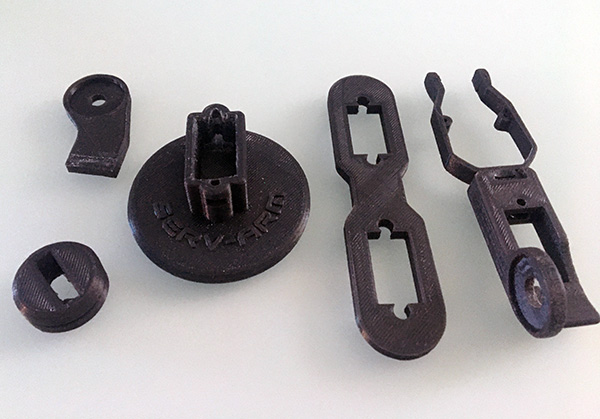
gli step successivi per la costruzione del braccio li leggerai in un prossimo articolo.
Per la parte controller avrai bisogno di selezionare dei componenti adatti.
Ho recuperato i potenziometri che già possedevo ed ho quindi dovuto modificare la base del controller e due pulsanti standard da circuito stampato o breadboard che userai in modalità pull-up.
In un prossimo articolo leggerai come è cambiata la base del controller.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza