
In questo articolo leggerai la terza parte della realizzazione di Enrico sul braccio robot calibrazione dei servo che hanno il compito di muovere le articolazioni del braccio.
Enrico ha voluto condividere questo articolo con tutti gli appassionati arduino partendo dall’inizio:
I servo utilizzati nel braccio robot
I servo usari da Enrico sono della DFRobot modello DF201LN con 180° di movimento alimentati da 4.8v a 7 .2v che presentano velocità e coppia riportate dal produttore:
- Velocità di rotazione 0.045 s x grado (4.8V); 0.035 sec x grado (6.0V); 0.02 sec x grado (7.2V)
- Forza di torsione: 10Kg•cm(4.8V); 12KG•cm(6V); 15KG•cm(7.2V)
come scrive Enrico:
Alla massima tensione il servo fornisce il massimo della potenza
Il segnale di comando è costituito da un’onda quadra inviata ripetutamente: il fronte positivo deve avere una durata compresa tra 1 e 2 millisecondi e l’ampiezza dell’onda deve essere di circa 20mSec (frequenza: 50 Hz). Il segnale fatto in questo modo deve essere inviato di continuo se si vuole che il servocomando, sotto sforzo, mantenga la posizione desiderata
Lo sketch del braccio robot calibrazione
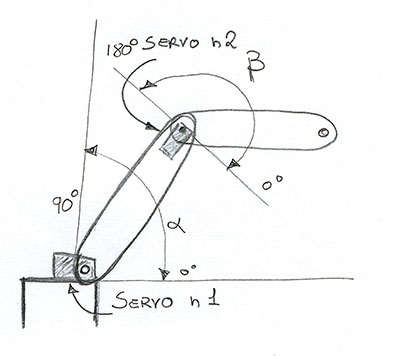
lo sketch di calibrazione si usa in fase di montaggio per allineare i supporti del robot.
Io li ho allineati tutti a 150 gradi ( per avere qualche grado di gioco ).
E ovvio dire che anche se ricostruisci il braccio in modo identico i gradi di ogni singolo servo andranno ricalibrati in base a come saranno montati.
Una differenza di pochi millimetri in fase di montaggio comporta il cambiamento quasi totale del funzionamento se non opportunamente calibrati i servo.
#include <Servo.h>
Servo mioservo;
void setup() {
mioservo.attach(9);
}
void loop(){
mioservo.write(150); // angolo di calibrazione //
}
ora passiamo ad analizzare le linee di codice dello sketch: braccio robot calibrazione:
linea 01: includi la classe Servo.h;
linea 03: definisci l’oggetto Servo chiamandolo mioservo;
linea 06: definisci che il servo è collegato al pin 9;
linea 10: posiziona il servo al grado 150, come descritto da Enrico per la calibrazione.
Come si esegue la calibrazione
Il braccio robot calibrazione puoi eseguirla inviando al servo il valore in gradi che ritieni opportuno per garantirti un adeguato grado di libertà del braccio, quindi procedi a posizionare il pezzo del braccio nella posizione corretta che vuoi mantenga il braccio quando il servo si trova in tale posizione.
Non è complesso e sarai pronto per il prossimo articolo in cui leggerai il codice di movimentazione del braccio scritto da Enrico.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza