
La breackout L298 l’ho acquistata qualche mese fa per testare driver per motori in cc dual full-bridge ossia il ponte-h più usato nella costruzione delle motor shield.
Solitamente le motor shield non ospitano solo il driver L298 ma anche una serie di componenti come diodi e transistor per il corretto funzionamento del driver.
Va detto di contro che il driver L298 è prodotto in differenti package da SMD a tradizionale e solitamente le motor shield preferiscono il componente SMD in quanto più piccolo, tuttavia di non facile dissipazione termica:

la breackout L298 prevede invece l’utilizzo della versione in package Multiwatt15 riconoscibile anche per la lettera “N” nella sigla del componente che offre una ampia superfice metallica di dissipazione.
Puoi trovare il datasheet del driver L298 qui.
La breackout L298 usando la versione L298N è particolarmente indicata per i progetti in cui i motori che vuoi utilizzare presentano un assorbimento limite dei 2A e la dissipazione del componente è necessaria al corretto funzionamento del progetto.
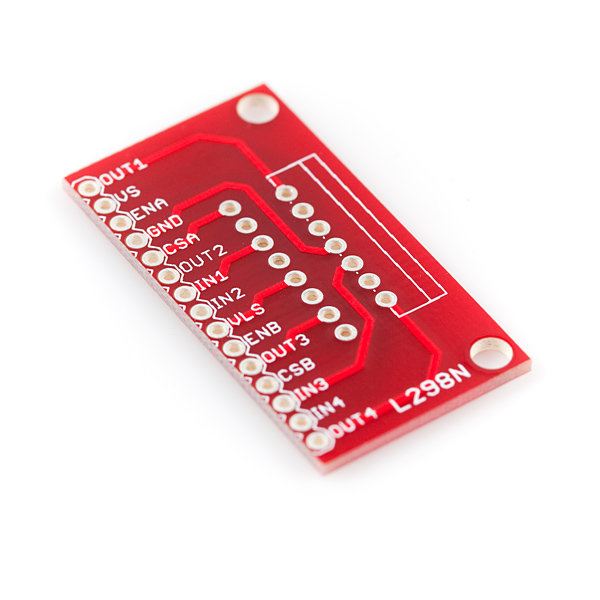
Breackout L298 da Sparkfun
Il produttore di shield e non solo Sparkfun mette a disposizione molte breackout e tra queste anche la breackout L298 che ho acquistato dal rivenditore italiano per riceverla rapidamente.
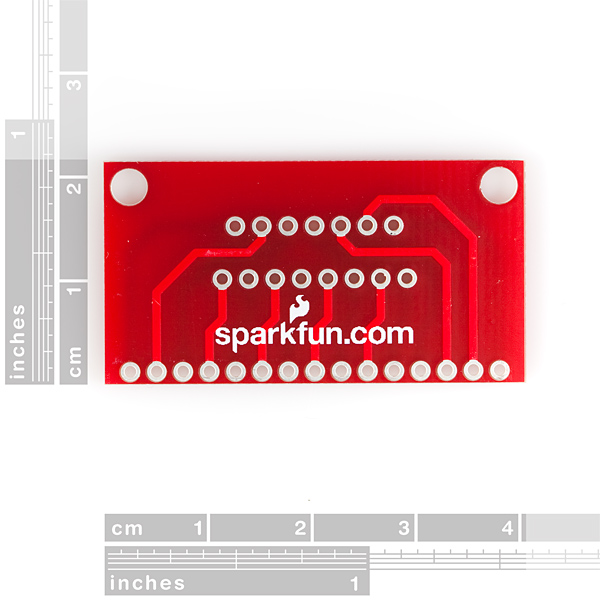
Le dimensioni della breackout L298 sono ridotte al minimo perchè lo scopo delle breackout in generale è solo quello di rendere accessibile il componente, in questo caso L298N, compatibile con una breadboard per fare i tuoi esperimenti o con una basetta millefori. La posizione dei pin di alcuni compnenti rende impossibile talune volte usarlo per un rapido esperimento su breadboard.
Saldatura dell’L298N sulla breackout
Penso ci sia poco da spiegare su come saldato la breackout L298 che è già predisposta per accogliere l’L298N l’ho posizionato in modo che fosse perpendicolare alla basetta stessa
ed ho provveduto a fissarlo con dei punti di saldatura:
A questo punto è pronta per essere utilizzata sulla breadboard per il prossimo test di funzionamento e uso nei progetti.
Ti segnalo che oltre alle shield motori tradizionali esistono anche alcune schede realizzate con il componente L298N a cui applicare l’aletta di raffreddamento e che possiedono anche tutta una serie di componenti base per semplificarti l’uso del driver:

Buon divertimento !!!

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
4 commenti
Vai al modulo dei commenti
Ciao Mauro, volevo farti una domanda!!!
Voglio pilotare dei motori di vibrazione DC da 12v che hanno la rotella nell’asse del motore e quando girano vibrano non so se rendo l’idea spero di si. Questo motore lo voglio pilotare tramite un semplice pulsante seguito da una resistenza da 10k, solamente che io sto usando una Arduino uno con ethernet shield w5100 a bordo Perchè si collega Arduino ad un server.
Nel montare tutto con shield ethernet e i vari collegamenti del driver l298n ho notato che quando premo il pulsante il motore parte ma subito dopo si resetta Arduino a ogni nuova premuta che faccio e di conseguenza devo premere reset per farlo ricoleggare al mio server.
Ho controllato se era un problema dei pin che occupa la shield ethernet ma uso per il pulsante il pin 8 ed è libero sulla shield e il 6 per pilotare in3 del driver.
Mi sai dare qualche consiglio per risolvere questo grande problema?
Il mio codice è un web server modificato con delle righe di codice per far funzionare il driver, ma senza pagina html, stampa solo delle righe al server quando premo il pulsante a quel numero di porta.
Grazie mille
Giovanni
Autore
Ciao Giovanni,
come lo descrivi sembra un problema elettronico ma se hai verificato che non ci siano conflitti nell’utilizzo dei pin puoi verificare con il monitor seriale cosa avviene subito prima del freeze
Ciao Mauro,non avviene nulla perchè tutto questo avviene quando sono collegato al server tramite la shield ethernet.
Sto pensando…… può essere che arduino uno si riavvia quando premo il tasto collegato al pin 5 perchè ha una resistenza da 10K? necessità di una resistenza più grande? perchè il riavvio succede solamente quando premo il tasto ma non al primo colpo, ma dopo due tre volte premuto velocemente. Poi il motore è di vibrazione quindi non è il motore dc classico, ha un peso nell’asse da spostare e secondo me assorbe in quell’istante troppa corrente e arduino non riesce a sopportare e riavvia.
Che ne pensi?
Ha pubblicato o usato mai un motore di vibrazione con arduino? Haa fatto qualche progetto?
Io lo piloto giustamente con il driver l298n tramite il pin 5 come descritto sopra, tasto premuto ==High IN3 driver.
Grazie ancora
Autore
Ciao Giovanni,
ovviamente devi avere attivo il monitor seriale mentre esegui il test che causa il problema.
Per problema elettronico mi riferisco anche all’assorbimento che devi calcolare tenendo un margine del 30% per sicurezza.