Tag: pir
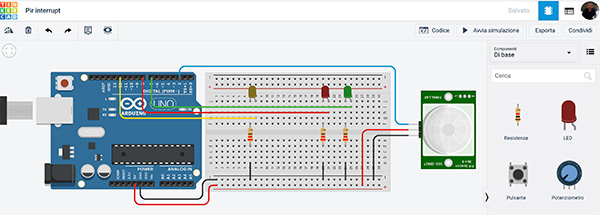
Tinkercad interrupt pir unisce un sensore pir ad un arduino per mostrarti come funziona un interrupt e come funziona sull’arduino uno.
La serie di articoli a cui questo tutoril si unisce è quella dedicata alle semplici lezioni per comprendere Arduino e basata sul simulatore tinkercad.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/tinkercad-interrupt-pir.html
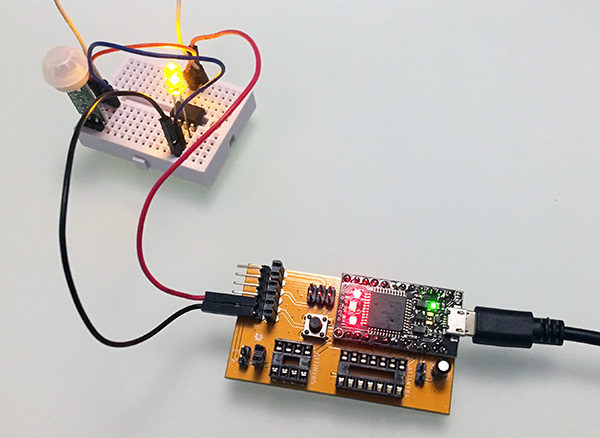
L’Attiny85 mini PIR sensor è un esperimento che ho voluto realizzare in previsione di progetti futuri.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/attiny85-mini-pir-sensor.html
Lunedì sono arrivati tanti nuovi sensori e schede da usare con Arduino, non ho resistito alla tentazione di sperimentare da subito uno di essi: il sensore PIR  Questo sensore, secondo le specifiche rilasciate dal produttore, è in grado di rilevare un oggetto in movimento in una stanza fino ad una distanza di 7 metri e con un angolo di incidenza di 110°. Per alimentarlo basta Arduino con i suoi 5v in quanto il suo assorbimento è di 50μA. Il sensore presenta una cupola in plastica, removibile, sfaccettata in modo da permettergli la copertura dei 110° indicati:
Questo sensore, secondo le specifiche rilasciate dal produttore, è in grado di rilevare un oggetto in movimento in una stanza fino ad una distanza di 7 metri e con un angolo di incidenza di 110°. Per alimentarlo basta Arduino con i suoi 5v in quanto il suo assorbimento è di 50μA. Il sensore presenta una cupola in plastica, removibile, sfaccettata in modo da permettergli la copertura dei 110° indicati:  tolta la cupola che fa da diffusore del raggio IR il sensore si presenta come nella figura a destra. Dal sensore fuoriescono 3 cavi di collegamento, da sinistra a destra:
tolta la cupola che fa da diffusore del raggio IR il sensore si presenta come nella figura a destra. Dal sensore fuoriescono 3 cavi di collegamento, da sinistra a destra:
- nero: GND o massa ( polo negativo di alimentazione )
- rosso: 5V ( polo positivo di alimentazione )
- verde: segnale digitale
Il tipo di colegamento puoi vederlo meglio in figura:  il funzionamento è semplice: quando rileva un movimento l’uscita del segnale passa da LOW ad HIGH, secondo le specifiche del costruttore l’uscita passa da 0,4v a 4v, quindi da una soglia inferiore ai 2,5v ad una superiore. Il sensore presenta anche un potenziometro per regolare il tempo di eccitazione dopo aver rilevato il movimento, ossia il tempo in cui il pin del segnale digitale resta a HIGH prima che, in assenza di movimento, torni a LOW:
il funzionamento è semplice: quando rileva un movimento l’uscita del segnale passa da LOW ad HIGH, secondo le specifiche del costruttore l’uscita passa da 0,4v a 4v, quindi da una soglia inferiore ai 2,5v ad una superiore. Il sensore presenta anche un potenziometro per regolare il tempo di eccitazione dopo aver rilevato il movimento, ossia il tempo in cui il pin del segnale digitale resta a HIGH prima che, in assenza di movimento, torni a LOW:  ho eseguito qualche test ruotando al massimo grado in senso orario il potenziometro di delay rilevando con arduino un tempo di circa 19-20 sec prima che il sensore torni a LOW, in assenza di movimenti rilevati. Specifico in assenza di movimenti rilevati in quanto se nel suo raggio d’azione si ripresenta un oggetto in movimento il suo stato resta HIGH in quanto il contatore interno si resetta e comincia a contare 19-20sec da quel momento. Per realizzare il progetto che ti propongo ho posizionato il potenziometro come in figura, riducendo a minimo il tempo tra rilevazione dell’oggetto e passaggio a LOW. Continua a leggere
ho eseguito qualche test ruotando al massimo grado in senso orario il potenziometro di delay rilevando con arduino un tempo di circa 19-20 sec prima che il sensore torni a LOW, in assenza di movimenti rilevati. Specifico in assenza di movimenti rilevati in quanto se nel suo raggio d’azione si ripresenta un oggetto in movimento il suo stato resta HIGH in quanto il contatore interno si resetta e comincia a contare 19-20sec da quel momento. Per realizzare il progetto che ti propongo ho posizionato il potenziometro come in figura, riducendo a minimo il tempo tra rilevazione dell’oggetto e passaggio a LOW. Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/sensore-pir-primo-progetto-e-test.html






 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza