
Il progetto bionic hand DRV8835 continua con la realizzazione dei driver di controllo degli attuatori lineari.
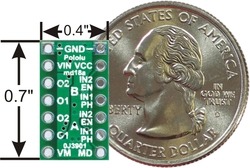
Come driver per il controllo ho deciso di utilizzare il DRV8835 sia per le ridotte dimensioni
sia per il sistema di resistenze di pull-down già presenti sugli ingressi digitali del driver che assicura stabilità anche in mancanza di connessioni o segnali di input.
Ho immaginato a quale potesse essere la sensazione di vedere piccoli movimenti della bionic hand DRV8835 quando i sensori non rilevano alcun segnale da impartire alle dita.
Caratteristiche tecniche del bionic hand DRV8835
Sul sito del produttore del driver puoi trovare le seguenti specifiche:
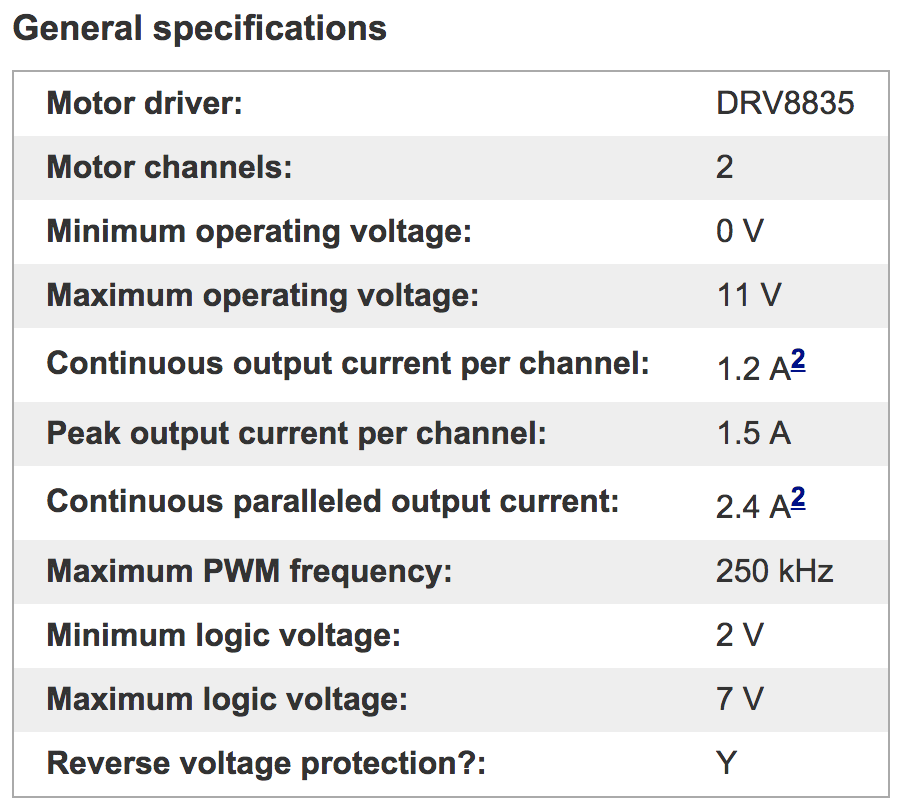
in cui i dati di mio interesse e che hanno contribuito alla scelta del driver sono la corrente di output per canale 1.2A continua con il picco a 1.5A sufficiente al corretto controllo degli attuatori firgelli PQ12-100-12.
Il driver usato per il progetto bionic hand DRV8835 dispone anche di un sistema di protezione dall’inversione di polarità per prevenire la rottura del driver stesso.
Collegamento del bionic hand DRV8835
Per collegare il DRV8835 ho seguito lo schema presente sul sito del produttore:
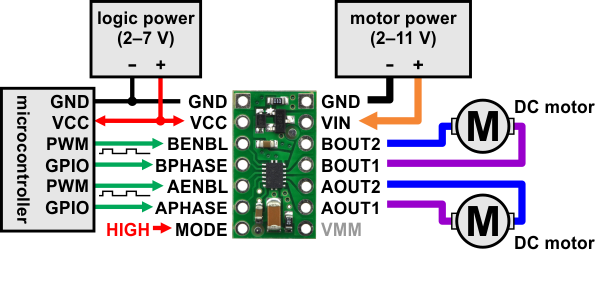
che utilizza la modalità di controllo con un solo pin PWM ed uno per la direzione per ciascun canale.
Questa configurazione ti permette di utilizzare 12 pin arduino, 6 pin pwm + 6 pin digitali, per controllare i 6 attuatori lineari utilizzati per il progetto bionic hand DRV8835
Il progetto prevede quindi che ii drv8835 siano 3, ciascuno in grado di controllare in modo indipendente 2 attuatori.
Nella confezione del DRV8835 trovi sia il driver sia i pin maschi da saldare lungo i due lati lunghi del circuito:

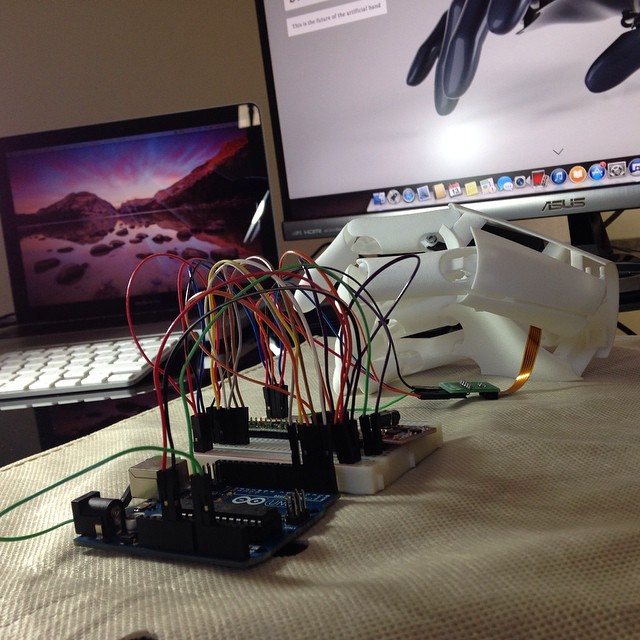
nel caso del bionic hand DRV8835 i contatti li puoi saldare direttamente sulla scheda come mostrato in figura sia il collegamento agli attuatori
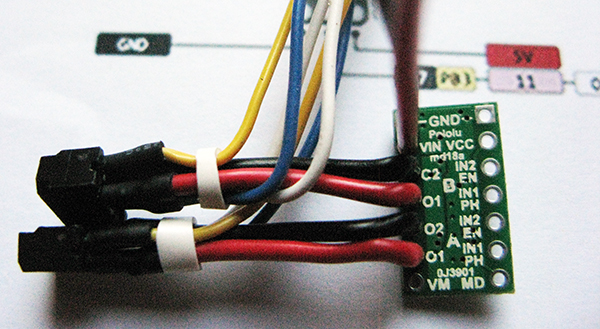
sia il collegamento ai pin di controllo a cui collegherò arduino:
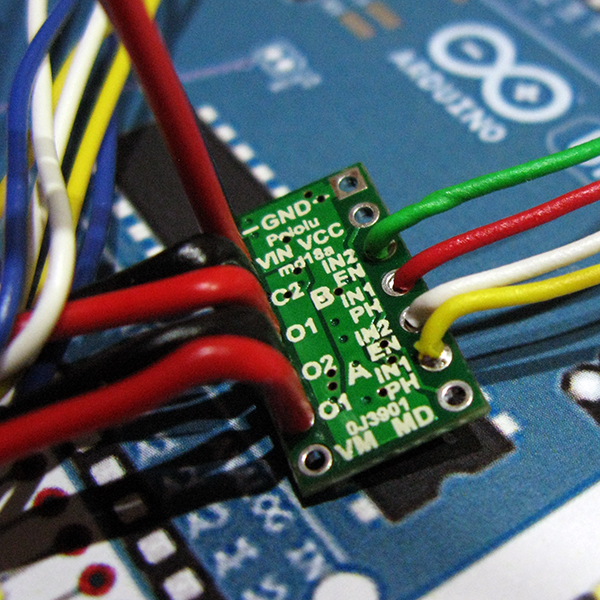
avrai notato che i pin sono accoppiati in modo che IN1 ed IN2 siano il controllo per il canale 1 ed il canale 2 del drv8835; ciascun canale presenta il pin EN ed il pin PHASE in cui il primo devi collegarlo ad uno dei pin pwm ed il secondo definisce la direzione di rotazione del motore corrispondente al canale.
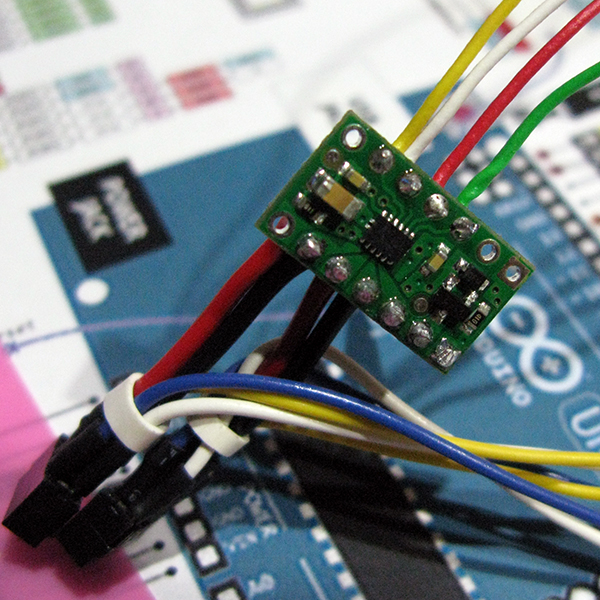
Nella figura sopra puoi vedere il driver con tutti i cavi necessari già saldati.
Nei prossimi articoli dedicati alla bionic hand DRV8835 proverai lo sketch che ho realizzato per controllare le dita della mano biomeccanica.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza