
E’ giunto il momento di assemblare ingranaggio stampa 3d alla base rotante e testare il risultato.

Dopo aver progettato e realizzato il tuo ingranaggio stampato in 3d e la base di montaggio del motore puoi procedere ad assemblare il tutto.
Il primo passo è montare il motore sulla nuova paratia di plexy glass, poi monti l’elemento più piccolo dell’ingranaggio sull’albero del motore mediante mounting hub in alluminio.
Procedi assemlando l’altro elemento dell’ingranaggio sull’anello interno dell’ingranaggio e termina montando il tutto, il risultato assomiglia a qualcosa di simile:
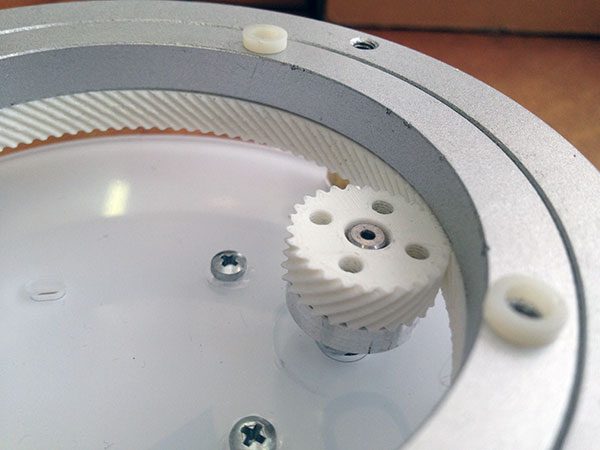
in cui la vicinanza delle due parti dell’ingranaggio costituiscono l’elemento fondamentale a determinare se il movimento possa essere fluido e costante, senza sforzi o avere giochi che porteranno alla perdita di precisione durante la rotazione.
Collegamento del motore stepper
Il controllo del motore stepper l’ho testato grazie al driver di controllo che vedi in figura e che mi è stato prestato da Gianni, appassionato di robotica, arduino e maker con cui spesso interagisco per ricevere consigli e suggerimenti sulle passioni comuni:
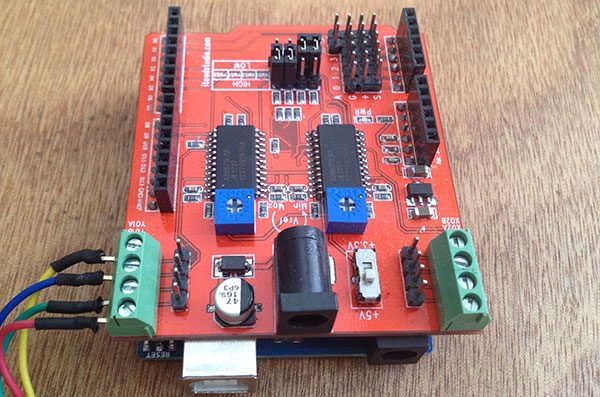
si tratta di un controller per motori stepper che puoi configurare per gestire i microstep grazie ad una serie di ponticelli visibili sulla parte finale della shield stessa.
Tale driver ti consente di controllare contemporaneamente due stepper allo stesso tempo.
Il motore stepper che ho utilizzato è quello del mio kit dolly che hai avuto già modo di collegare in occasione del progetto dolly stesso.
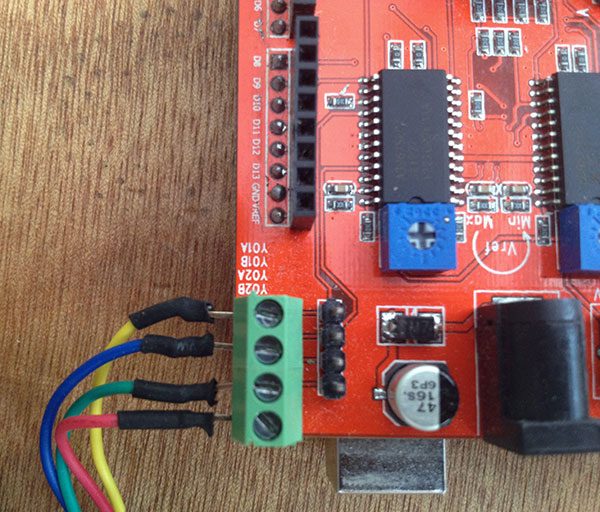
Ecco come ho collegato il motore sapendo che le due fasi sono rispettivamente le coppie di fili:
- giallo – blu
- verde – rosso
il progetto assemblare ingranaggio stampa 3d è quasi concluso e ti basta aggiungere nuovamente la piastra di chiusura della base rotante per ottenere il risultato:
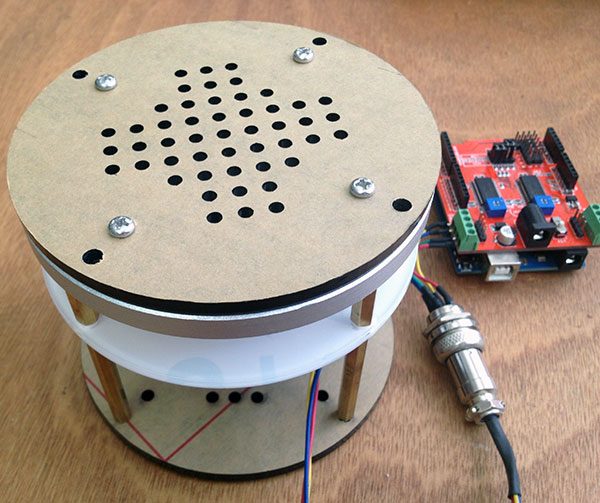
nel prossimo articolo vedrai lo sketch di test che ho realizzato ed il video del primo movimento della base rotante.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza