
Tinkercad Arduino e Motorini riprende la serie di articoli dedicati ai tutorial gratuiti realizzati con il simulatore online arduino del sito.
I precedenti articoli sono tutti catalogati nella pagina dedicata a questa serie di tutorial: Corso Arduino Gratuito con Tinkercad
Oggi imaperai come collegare e controllare in modo semplice due motori DC ( Corrente continua ) ad un Arduino usando il driver L293B.
Tutorial tinkercad Arduino e Motorini
Come sempre in questa serie di video tutorial ecco il video che ho realizzato per oggi:
Il tutorial tinkercad arduino e motorini ti mostra in primo luogo come collegare un driver motori L293B ad un Arduino Uno ed a due motori dc.
In seguito, paragrafo successivo, vedrai come realizzare un primo semplice codice di controllo dei due motori connessi.
Lo schema
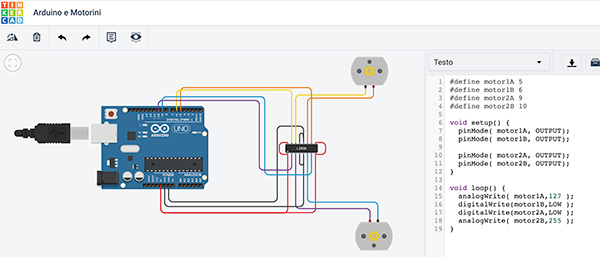
Lo schema elettronico è riportato nell’esercizio pubblico associato al tutorial che puoi trovare qui; inoltre di seguito un’immagine:
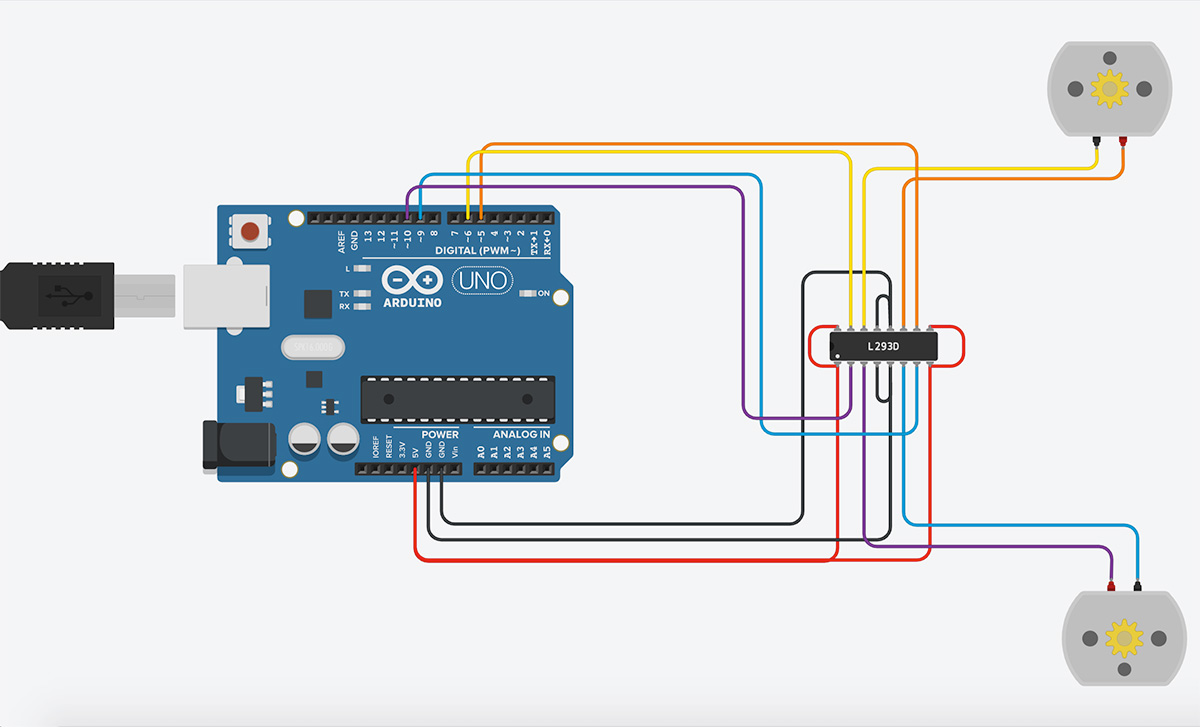
Lo schema che ho utilizzato è uno dei più diffusi sul Web e sfrutta due pin per il controllo di ciascun motore.
Questo tipo di collegamento, come avrai intuito, ti obbliga ad utilizzare due pin PWM per ciascun motore per consentirti di controllare la velocità di rotazione sia in un verso sia nell’altro.
Esistono schemi di collegamento del medesimo driver che differiscono da questa configurazione e fanno uso si un solo pin analogico ed uno digitale per il controllo di ciascun motore.
Lo sketch
Lo sketch tinkercad Arduino e Motorini è mostrato nel video mentre viene scritto linea per linea, e di seguito in formato testuale:
#define motor1A 5
#define motor1B 6
#define motor2A 9
#define motor2B 10
void setup() {
pinMode( motor1A, OUTPUT);
pinMode( motor1B, OUTPUT);
pinMode( motor2A, OUTPUT);
pinMode( motor2B, OUTPUT);
}
void loop() {
analogWrite( motor1A,127 );
digitalWrite(motor1B,LOW );
digitalWrite(motor2A,LOW );
analogWrite( motor2B,255 );
}
in cui le prime 4 linee servono a definire i pin a cui sono connessi rispettivamente il motore 1 ed il motore 2;
linea 06: definisci la funzione setup();
linee 07-08: imposta i pin corrispondenti al primo motore in modalità OUTPUT;
linee 10-11: imposta i pin corrispondenti al secondo motore in modalità OUTPUT;
linea 14: definisci al funzione loop();
linee 15-16: imposta il pin 1A, primo motore collegamento arancione, ad un valore di 127, ossia circa la metà del valore PWM massimo erogato da Arduino, e il pin 1B, collegamento giallo, ad un valore LOW in digitale;
in questo modo avrai che il motore 1 riceverà circa 2,5v sul pin positivo, essendo l’alimentazione del driver L293B connessa ai 5v di Arduino, e 0v sul negativo;
linee 17-18: esegui i medesimi comandi visti per il motore 1 sul motore 2 tenendo conto che il pin 9, filo azzurro connesso al polo negativo del motore riceverà 0v ed il pin 10, connesso al filo viola ed al positivo del motore, riceverà il massimo del voltaggio erogato dal driver: 5v in quanto il valore analogico inviato è 255.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza