
Gabriele Satin ha realizzato il progetto robot hand XBee per l’esame di maturità ed ha voluto condividere il suo sapere e le sue sperimentazioni anche con gli appassionati che ogni giorno leggono il blog.
Ringrazio Gabriele per la condivisione della conoscenza e per avermi voluto rendere portavoce del suo progetto.
Per la complessità del progetto ho deciso di dividere in più articoli il progetto per meglio descrivere ogni parte dettagliatamente partendo dall’idea, la realizzazione meccanica, quella elettrica e gli sketch del trasmettitore e ricevitore del robot hand XBee.
Il progetto robot hand XBee
Riporto la descrizione del progetto scritta da Gabriele:
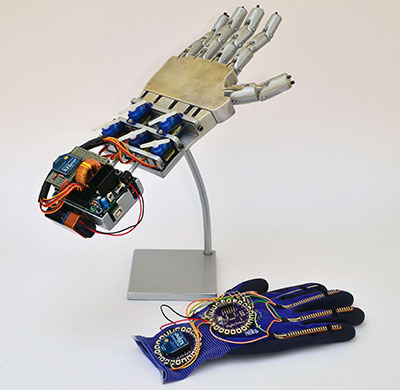
Il progetto consiste in una mano artificiale che muove le dita tramite l’utilizzo di servomotori e in un guanto di controllo che permette di comandare il movimento delle dita in base a quello della propria mano grazie a dei sensori.
Le motivazioni
La principale motivazione che mi ha spinto alla realizzazione di questo progetto è stata la passione e la curiosità per tutto ciò che riguarda la robotica e l’automazione, e l’interesse nella ricerca scientifica sulle protesti automatizzate, in particolare suscitata per questo progetto osservando nel web protesi robotiche in funzione, con la volontà di imitarne il funzionamento essenziale.
Il funzionamento
Muovendo le dita il sistema del guanto invia al sistema della mano artificiale in comunicazione senza fili, le informazioni sullo stato delle dita, decidendo la rotazione dei servomotori e quindi la chiusura delle dita artificiali.
Il guanto è dotato di sensori di flessione per le dita, ovvero dei resistori che variano il proprio valore di resistenza in base alla flessione che subiscono. Questi sono collegati agli ingressi analogici di un microcontrollore, Arduino Lilypad, che converte in numero i valori di tensione letti, con sensibilità a 10 bit (210=1024 valori), quindi da 0, corrispondente a 0 V, a 1023, corrispondente alla massima tensione di riferimento (5 V di default).

I 5 valori letti vengono trasmessi al microcontrollore presente sulla mano artificiale attraverso il modulo di comunicazione wireless XBee, che permette una comunicazione in “full-duplex”, cioè trasmissione e ricezione possono avvenire nello stesso momento; ma in questo caso viene utilizzato solo in “simplex”, ovvero la comunicazione avviene in un solo verso, dal guanto alla mano artificiale.
I valori devono prima essere convertiti con estensione di tipo byte, a 8 bit (28 = 256 valori), ovvero devono essere compresi tra 0 e 255 per permettere al modulo XBee la trasmissione dei dati.
Una volta effettuata la conversione il valore viene inviato e il microcontrollore Arduino UNO presente sulla mano artificiale elabora il dato ricevuto in modo tale da renderlo adatto al controllo dei servomotori che mettono in moto le dita della mano.
Per controllare i servomotori è necessario definire l’angolazione voluta, ovvero la posizione alla quale si vuole che si trovi il rotore. Per questo tipo di servomotori è necessario definire un valore compreso tra 0° e 180°, quindi il valore ricevuto, compreso tra 0 e 255, deve a sua volta essere riconvertito affinché sia compreso tra 0 e 180.
I materiali utilizzati
I materiali utilizzati nella realizzazione del guanto di controllo sono:
- Guanto;
- Scheda Arduino Lilypad;
- Shield per il collegamento del modulo wireless Xbee;
- Sensori di flessione;
- Resistori da 45 KΩ;
- Pacco batterie (4,5 V).
I materiali utilizzati nella realizzazione della mano artificiale sono:
- Struttura in acciaio;
- Dita in legno;
- Scheda Arduino UNO;
- Robot_Shield per facilitare il collegamento dei servomotori e migliorare l’alimentazione a batteria;
- Shield per il collegamento del modulo wireless Xbee;
- Servomotori da 5 V;
- Fili trasparenti che fungono da tendini delle dita;
- Batteria 9V.
La realizzazione del robot hand XBee
La realizzazione del robot hand XBee è cominciata dalla costruzione delle dita della mano artificiale:

inizialmente ho utilizzato il sughero, facile da lavorare, per trovare la forma giusta delle dita, quindi sono poi passato all’utilizzo del legno.
Ho scelto di non usare l’acciaio perché per il suo peso avrebbe richiesto fili più resistenti e motori più potenti.
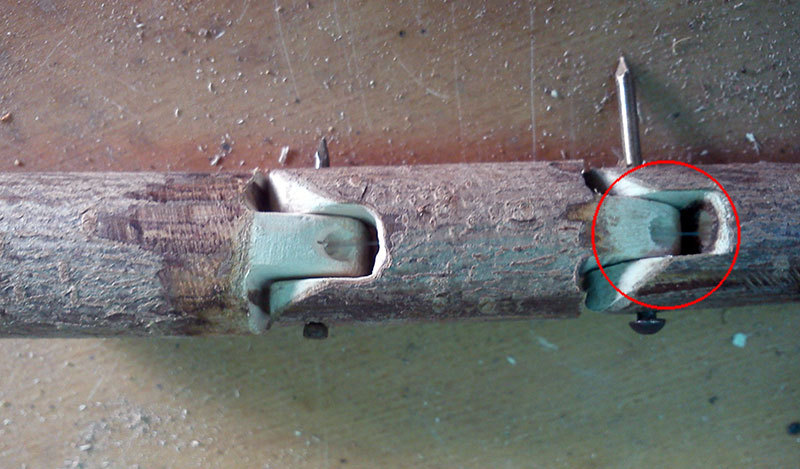
Ho voluto cerchiare in rosso la finitura del passaggio creato da Gabriele per ottenere il movimento del robot hand xbee mediante tirante. Trovo davvero molto precisa e benfatta. [Mauro]
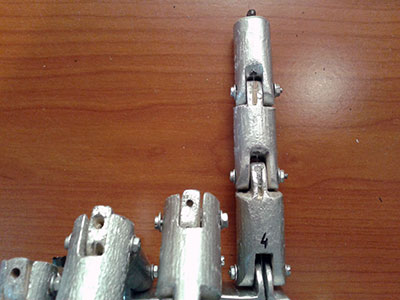
Successivamente è stato realizzato il palmo, inizialmente in legno, poi in acciaio, vista la sua fragilità per le parti più sottili.
Poi è stata realizzata la parte per contenere i servomotori e quella per Arduino UNO con le due shield.

la realizzazione finale della mano puoi osservarla nella foto seguente:
Questa prima parte, dedicata alla realizzazione del progetto robot hand xbee di Gabriele l’ho dedicata alla costruzione meccanica ed alla decsrizione delle scelte del materiale e dei componenti, nel prossimo articolo leggerai come è stata concepita la parte elettronica e quali scelte ha affrontato e risolto Gabriele.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
6 ping
[…] Puoi leggere la prima parte del progetto con le motivazioni ed il principio di funzionamento in questo articolo. […]
[…] ( Gnd ) come pull-down per le motivazioni descritte da Gabriele nella prima parte del progetto robot hand xbee […]
[…] Robot hand XBee di Gabriele Satin […]
[…] Robot hand XBee di Gabriele Satin […]
[…] Puoi leggere la prima parte del progetto con le motivazioni ed il principio di funzionamento in questo articolo. […]
[…] hanno da pochi giorni sostenuto gli esami di maturità con progetti come il braccio robot o la mano robot di […]