
Continua la presentazione dell’Albero Robot di Carlo Villoresi con la parte di montaggio elettronico del robot.
Se non lo hai già fatto leggi il primo articolo dedicato al progetto Albero Robot realizzato da Carlo e gentilmente condiviso con noi appassionati.
In questo secondo articolo leggerai come montare la parte elettronica che come al solito lascio alle parole di Carlo:
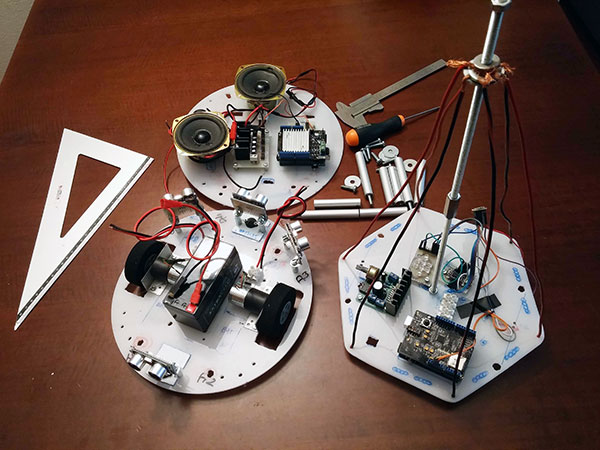
Montaggio parte elettronica dell’Albero Robot
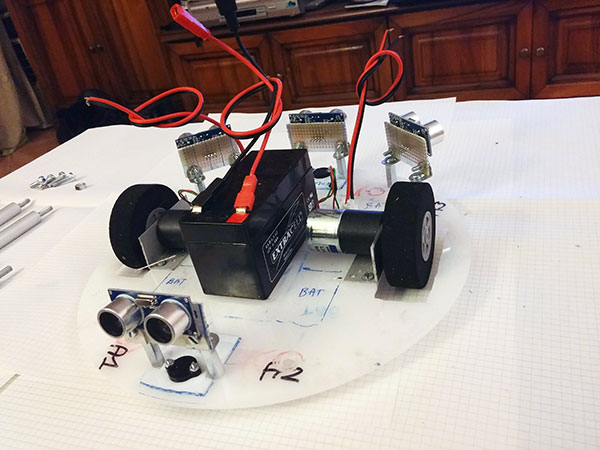
Movimento robot
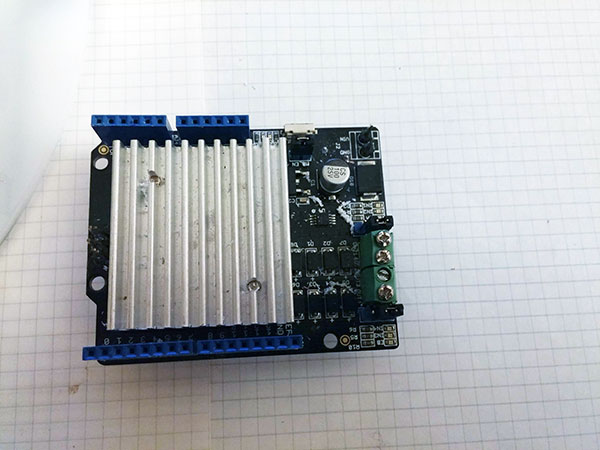
Per far muovere il robot ci serviamo di due motoriduttori collegati alla scheda Arduino Motor Shield la quale è inserita sopra la scheda di Arduino.
L’ alimentazione delle due schede viene assicurata collegando i due terminali del motor shield ai pin all’alimentatore corrispondenti ad una tensione di 12V
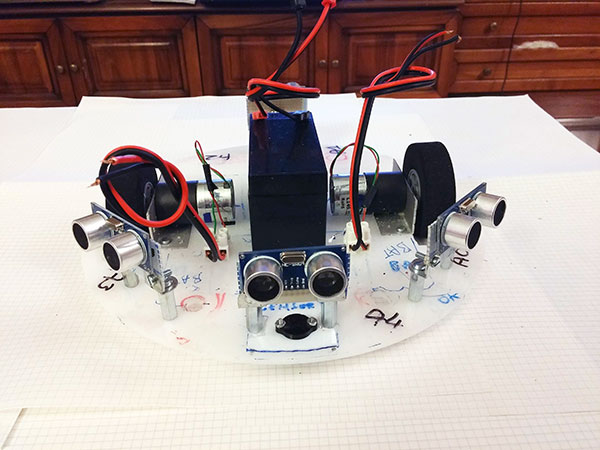
Trasmissione dei segnali dei sensori e loro alimentazione
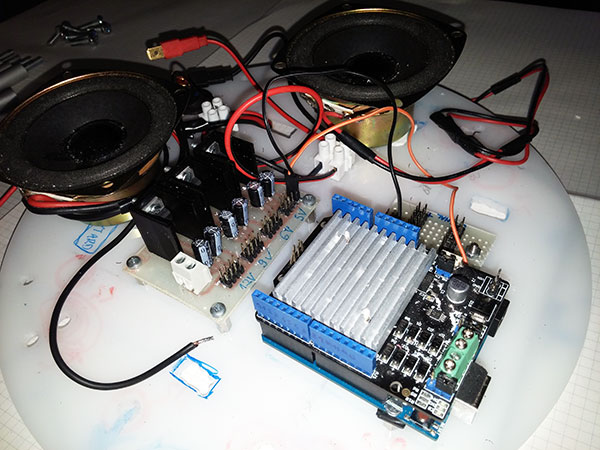
Ciascun cavo del sensore è collegato ad un pin della basetta sensori, quella situata vicino alla scheda motor shield, e da essa collegato al pin corrispondente in Arduino.
La tensione di alimentazione dei sensori è fornita dalla stessa basetta nella parte destra, dove una fila di doppi pin saldati in parallelo fornisce una tensione di 5V,essa è collegata all’alimentatore, precisamente ai pin che forniscono una tensione di 5V;
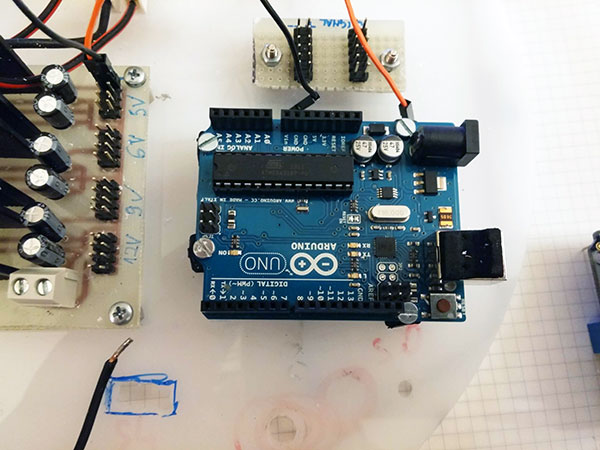
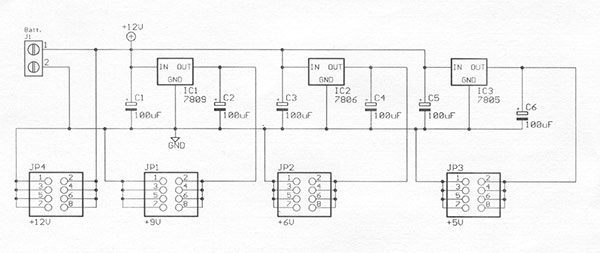
Alimentazione
Il circuito di alimentazione fornisce una tensione di 12V, 9V, 6V, 5V distribuite in quattro file di doppi pin:
ecco lo schema inviato da Carlo:
Suono
La generazione del suono avviene per mezzo di una scheda Arduino Music Shield con output tramite cuffia. 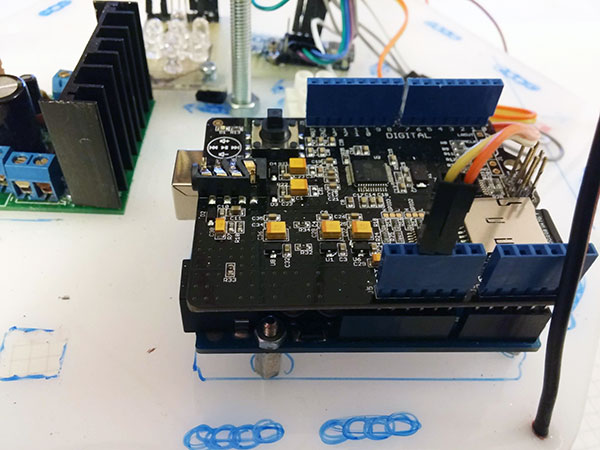
Il segnale audio viene trasmesso ad un amplificatore stereofonico alimentato da una tensione di 12V prelevabile dall’alimentatore multi tensione.
All’ingresso viene inserito un cavo jack maschio doppio il quale trasmette il segnale audio in uscita della scheda musicale, il segnale viene così amplificato in modo sostanziale ( potenza 15W ).
La scheda dispone di un lettore di micro SD (massima capacità 2GB) sul quale è possibile registrare varie canzoni in formato mp3.
In alternativa e comunque per un uso più tecnico si può utilizzare uno piccolo speaker di 8 ohm per la generazione di suoni midi tipo suonerie RTTTL, collegandolo ad un pin in uscita libero di Arduino ( io l’ho collegato ad Arduino del primo piano superiore, adibito alla gestione dei motori);
Luci
Gli effetti sonori sono generati dalla scheda microcontrollore Adafruit Trinket 5V, la quale ha a disposizione pochi pin e per questo adatta ad eseguire funzioni limitate. 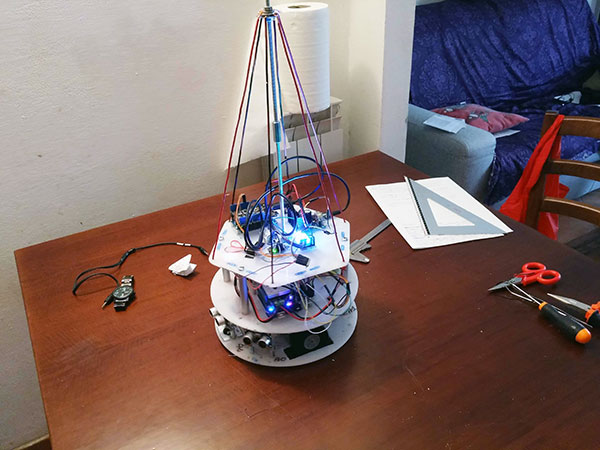
In pratica vi sono 5 pin collegati ad una basetta contenente 8 led che vengono comandati a coppie. In totale si accendono in sequenza 4 coppie di led comandati dalla scheda secondo uno semplicissimo sketch.
L’ idea è quella di delegare ad un piccolo microcontrollore il controllo degli effetti luminosi. Per mancanza di tempo non ho potuto elaborare uno schema di combinazioni di effetti luminosi più complesso come ad esempio la variazione dell’ accensione dei led a tempo di muscia ma a questo il robot si può benissimo prestare, con un po di tempo a disposizione.
Componenti elettronici per la realizzzazione del robot
Carlo ti ha fornito anche una lista dei materiale necessari alla realizzazione del robot, che riporto di seguito:
Microcontrollori
- Due Arduino Uno SMD Rev3;
- Adafruit Trinket – mini microcontroller 5V Logic ( scheda alla quale vengono applicati i 5 led luminosi per la generazione di effetti luminosi; la scheda viene alimentata dai pin di Arduino (quello collegato alla scheda Music Shield) di alimentazione a + 5V )
Controllo motori
- Arduino Motor Shield V2.0;
Scheda Musicale
- Arduino Music Shield;
Speaker
- coppia di speaker da 4/8 ohm di impedenza;
- uno speaker piccolo da 8 ohm di impedenza;
Alimentazione
- scheda di alimentazione multitensione autocostruita (vedere schema su file pdf);
- interruttore con led blue incorporato;
- batteria al piombo 12V, 1.3Ah;
Motori
- 2 motoriduttori serie L149 (tipo L149.12.188);
Sensori
- 4 Sensori ad ultrasuoni tipo SR04;
Led luminosi
- 8 Led ad alta luminosità saldati su una basetta millefori;
Basetta distribuzione tensione
- basetta per la distribuzione della tensione (5V) e del segnale dai sensori ad Arduino;
Amplificatore audio stereo
- é presente un amplificatore audio stereo della potenza di 15W;
Nel prossimo articolo lo sketch per ciascun microcontrollore ed il video dell’albero robot in funzione.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza