
E’ passato qualche mese dall’ultimo articolo dedicato alla Delta 3D e voglio riprendere la serie di articoli affrontando la configurazione del software.
![]()
Ho scelto per la mia Delta 3D MarlinKimbra come firmware perché:
- è sviluppato da un italiano e tra connazionali penso sia giusto sostenersi;
- è disponibile sia per la versione basata su Arduino Mega sia su Arduino Due;
- è disponibile online un pratico e semplice configuratore
Il firmware Marlin Kimbra è sviluppato, aggiornato e distribuito in pieno spirito open-source da Mago Kimbra, pseudonimo al quale non sono riuscito a dare un nome, che merita tutta la mia stima per il grande lavoro che quotidianamente svolge non solo per mantenere aggiornato il suo firmware ma sopratutto per rispondere a tutti gli utenti ed appassionati che utilizzano il Marlin Kimbra per la propria stampante.
Delta 3D MarlinKimbra di Mago Kimbra
Il firmware Marlin Kimbra e Marlin Kimbra for Due ( utilizzabile con l’arduino due ) supportano diverse meccaniche usate per le stampanti 3D:
- Cartesiana
- Core XY
- Core XZ
- Delta
- Scara
Nel mio caso ho selezionato la Delta.
Puoi ottenere il software sia dal sito http://marlinkimbra.it già configurato seguendo il semplice wizard passo passo che il Mago ha realizzato via Web:

al termine della configurazione otterrai il file contenente sia il firmware per la Delta 3D MarlinKimbra sia i file di configurazione già compilati con i parametri indicati.
In alternativa puoi scaricare tutto il firmware direttamente dal GitHub del Mago:
e procedere alla configurazione manuale del firmware.
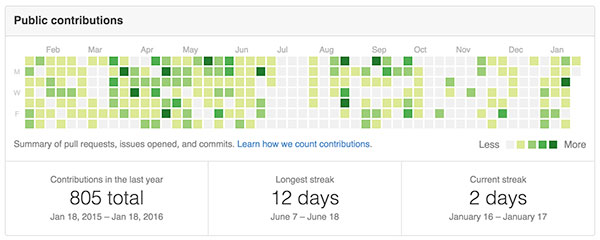
Il repository del firmware Marlin Kimbra è molto attivo come puoi vedere dall’immagine:
Configurazione del Marlin Kimbra 4.1.2
I file di configurazione nella versione 4.1.2 sono stati divisi in funzione della meccanica che utilizzi in modo che una semplice inclusione da parte del file di configurazione principale: Configuration.h ti permetta di caricare solo i parametri della tua stampante, nel mio caso: Configuration_Delta.h
In particolare in questo articolo leggerai come configurare il secondo file: Configuration_Delta.h che prende in considerazione i parametri specifici della Delta 3D marlinkimbra.
La parte più ostica della configurazione, almeno nel mio caso, è stata la meccanica della Delta 3D di cui non disponevo di tutte le informazioni necessarie ed ho dovuto ricavarle con prove successive.
Se usi il configuratore on-line nella sezione meccaniche troverai i seguenti parametri da inserire:
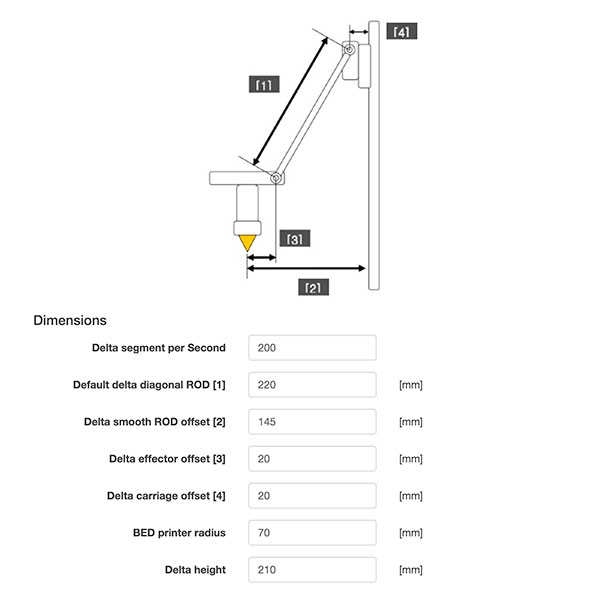
alcuni dei quali sono noti per la Delta 3D kossel 250 come ad esempio “DEFAULT_DELTA_DIAGONAL_ROD” che come sai è di 288mm ( leggi articolo su come realizzarli ) ed anche i valori per “DELTA_EFFECTOR_OFFSET” li puoi ricavare dal file openScad ( leggi articolo di presentazione ).
Più complesso è stato definire i valori di “DELTA_CARRIAGE_OFFSET” che approssimativamente ho trovato essere 27/28mm sui siti in cui sono distribuiti i disegni per la realizzazione della Delta 3D Kossel 250, ma nella pratica ho dovuto provarli verificando che il valore corretto, nel mio caso è 27mm, e questo determina il calcolo del “DEFAULT_DELTA_RADIUS” insieme al valore “DELTA_SMOOTH_ROD_OFFSET”
In pratica il valore DEFAULT_DELTA_RADIUS è determinato sottraendo al valore DELTA_SMOOTH_ROD_OFFSET i valori di DELTA_CARRIAGE_OFFSET e DELTA_EFFECTOR_OFFSET.
Questo valore è fondamentale per il corretto funzionamento della Delta 3D MarlinKimbra in quanto sulla base di questi valori il firmware Marlin kimbra, come il Marlin originale, determina i calcoli che sposteranno l’estrusore sul piano.
In una nota rilasciata da Mago Kimbra ho trovato un’importante informazione relativa proprio al valore di DEFAULT_DELTA_RADIUS in cui l’autore del firmware chiarisce che tale valore non è relativo all’area di stampa ed in effetti leggendo il file di configurazione:
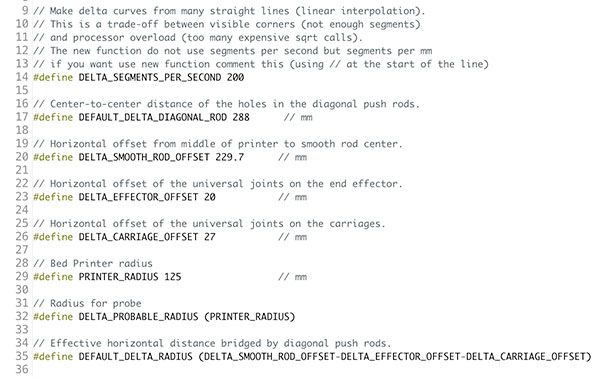
comprendi che il valore riferito al raggio dell’area stampabile è “PRINTER_RADIUS” che a sua volta è riutilizzato dal valore “DELTA_PROBABLE_RADIUS”.
Nell’immagine precedente puoi anche vedere i valori che ho impostato per la mia Delta 3D printer anche se nel tuo caso possono essere differenti perché legati alla meccanica, le dimensioni e la precisione costruttiva.
Nei prossimi articoli dedicati alla Delta 3D MarlinKimbra leggerai le altre modifiche ai file di configurazione e come impostare i tuoi valori.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
11 commenti
Vai al modulo dei commenti
gradirei anche a pagamentio ricevere il firmware configurato per la mia stampante 3d delta realizzata da poco.
saluti
Pasquale
Autore
Ciao Pasquale,
lo farei volentieri anche gratis, tuttavia il bello di realizzare una stampante come la Delta è di configurarsi il proprio firmware per adattarlo alla propria meccanica.
In ogni caso è complesso configurare un firmware senza aver a disposizione la stampante e conoscere tutti i suoi particolari meccanici.
Ti consiglio di provare il MarlinKimbra che ha un configuratore on-line ben fatto.
Grazie per i consigli e per tutto quello che metti a disposizione .
Saluti
Ciao mauro devo chiederti una cosa .
Nelle dstampanti 3d per evitare di perdere il passa di stampa e posdibile aggiungere degli encoder e avere il firmiware.grazie mille.
Autore
Ciao Giuseppe,
aggiungerli penso sia possibile, devi scriverti la parte firmware di controllo.
Mi viene in mente che io sudo dei 200passi giro ridotti a 1/32simo per cui 6400 impulsi giro ed encoder di questo tipo mi sa che costano molto.
ciao mauro
sono appena passato da hardaware a software per costruire la mia reprap tipo prusa i3 e volevo scegliere marlin ma ho scoperto che ce marlin e marlin-kimbra e vorrei sapere che differenza ce tra i due?
Autore
Ciao Mattia,
puoi leggere sui rispettivi siti le caratteristiche di entrambi. Sono software complessi che non è possibile descrivere o spiegare in un commento.
Il firmware Marlin Kimbra è sviluppato, aggiornato e distribuito in pieno spirito open-source da Mago Kimbra, pseudonimo al quale non sono riuscito a dare un nome, il suo nome è Alberto Cotronei 🙂
Autore
Grazie Nicola !!!
Buongiorno, grazie per le info, purtroppo il sito marlinkimbra non é raggiungibile.
Autore
Ciao Giorgio,
purtroppo ho constatato anch’io che il sito non è più disponibile, spero torni presto funzionante.