
Finalmente le ruote nel ZeroBot RPi wheel per fornire al tuo robot la corretta modalità di spostamento.
Le ruote sono la parte fondamentale del robot ed assicurano la corretta propulsione.
ZeroBot RPi wheel
ZeroBot RPi wheel serve a comprendere meglio quale sia il sistema utilizzato.
Le ruote vendute con il kit motore potrebbero essere una valida soluzione ed in tutti i robot che ho trattato e realizzato con i gear motor sono sempre stati la soluzione che ho preferito ( vedi ad esempio HBR ) tuttavia l’autore del progetto ZeroBot RPi ha disegnato e rilasciato delle ruote specifiche:

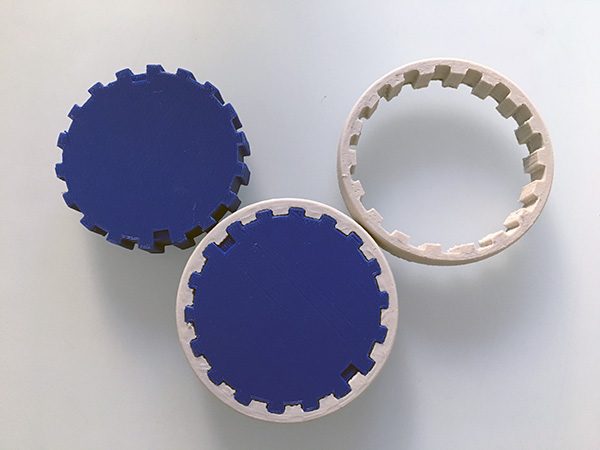
entrambe sono composte da due componenti: la parte interna della ruota:

in PLA classico o altro materiale rigido che vuoi utilizzare per la realizzazione con la stampante 3D e lo pneumatico:

più complesso da stampare in quanto va realizzato con filamento gommoso per conferirgli aderenza al terreno.
Il kit ZeroBot RPi wheel è quindi composto da queste due parti:
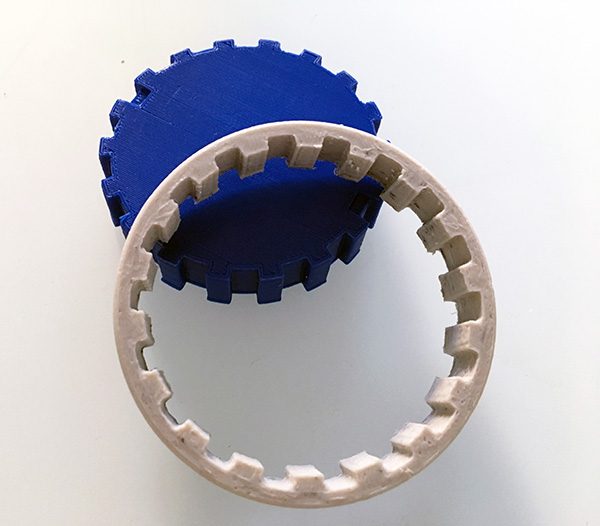
il montaggio è semplice: lo pneumatico va inserito sul cerchione 🙂
Dal lato opposto del cerchione, quello interno, trovi una scanalatura disegnata come la forma dell’alberino dei gear motor utilizzati:
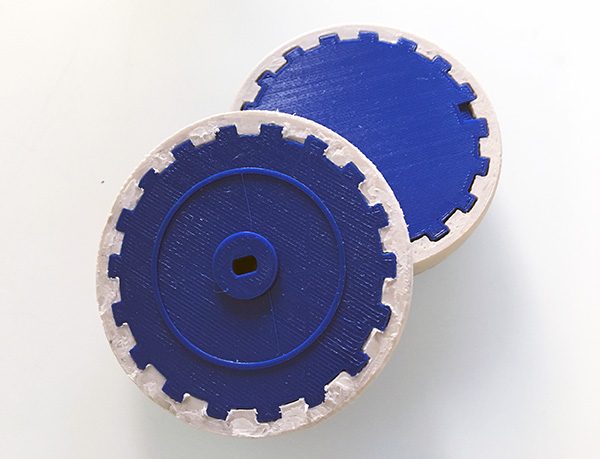
per consentirti facilmente di montare le ZeroBot RPi wheel al robot.
Nei prossimi articoli monterai i motori e quindi su di essi le ruote.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza