
Tinkercad Circuit servo control è il sesto tutorial dedicato all’utilizzo di arduino con un simulatore come tinkercad circuit partendo da semplici progetti con tutorial video.
La serie degli articoli parte sia con l’idea di insegnare a tutti l’uso semplice di arduino sia per testare le funzionalità di questo simulatore gratuito on-line.
Come nei precedenti articoli potrai trovare il progetto tinkercad circuit servo control pubblicato liberamente e consultabile a questo link.
Tinkercad Circuit servo control project
Il progetto tinkercad circuit servo control ti mostra come controllare un servomotore collegato ad arduino e la libreria Servo.h che hai in dotazione con Arduino.
L’utilizzo dei servomotori in robotica è molto diffuso grazie alla loro semplicità di controllo ed alle caratteristiche meccaniche che possiedono.
Anche i servo motori ad uso hobbystico, comunemente usati anche in modellismo, possiedono un rapporto di coppia molto elevato se confrontato con il costo di ciascun componente.
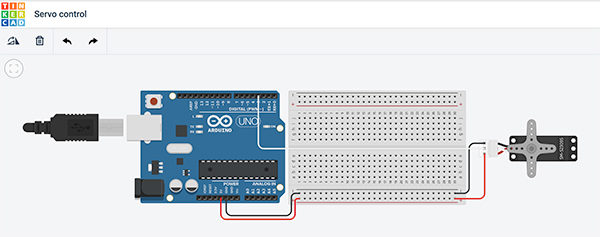
Lo schema di collegamento di un singolo servomotore è semplice e puoi realizzarlo come mostrato in figura:
o direttamente all’arduino se non possiedi una breadboard.
Tinkercad Circuit servo control sketch
Lo sketch tinkercad circuit servo control, mostrato nel video tutorial, e presente nel progetto sul sito tinkercad è il seguente:
#include <Servo.h>
#define pinServo 3
Servo myservo;
void setup() {
myservo.attach(pinServo);
}
void loop() {
myservo.write(0);
delay(1500);
myservo.write(90);
delay(1500);
myservo.write(180);
delay(1500);
}
in cui la prima linea include la libreria Servo.h, la seconda definisce il pin a cui hai collegato il servo motore e la terza definisce una istanza di controllo del servo.
L’istanza myservo ti servirà per impartire al servo tutti i comandi che vuoi siano eseguiti dal servo stesso.
L’unica linea della funzione setup usa il metodo attach() per indicare all’istanza myservo a quale pin è collegato il servo.
La funzione loop() contiene soli due comandi ripetuti per tre volte, il primo comando è myservo.write() a cui passi il grado a cui vuoi che il servo arrivi ed il secondo è delay() che introduce una pausa necessaria al servo per raggiungere la posizione desiderata.
Nota che l’unica differenza tra i tre comandi di write è il parametro tra parentesi con cui è definito il grado di spostamento da impartire al servo.
Tinkercad Circuit servo control video
Il video mostra tutti i passaggi per realizzare il circuito e scrivere il codice.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza