
Il progetto Robot Arm di Nicholas presentato lo scorso mercoledì continua con la descrizione dello sketch e non solo.

Nicholas, da buon maker ed attento progettista, prima di realizzare il prototipo e lo sketch di funzionamento ha ragionato sul funzionamento generale e sulle componenti in gioco.
Se non hai letto l’articolo precedente sul progetto puoi farlo qui.
Trovi tutto il materiale di tesi, le foto, lo sketch ed il video del progetto sul gitHub della famiglia Maiocchi.
Come per il precedente articolo lascio che a descrivere questa parte sia Nicholas.
Il diagramma di flusso del Robot Arm di Nicholas
Ecco il diagramma di flusso generale:
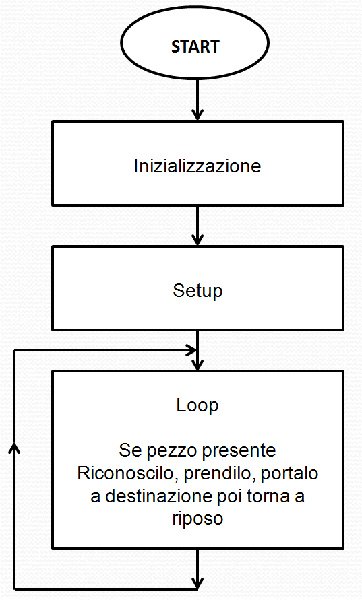
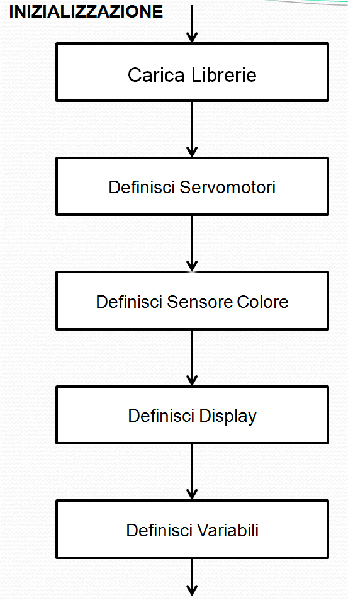
La parte di “Inizializzazione” si sviluppa nelle linee da 4 a 28 dello sketch Robot Arm di Nicholas che troverai nel paragrafo successivo.
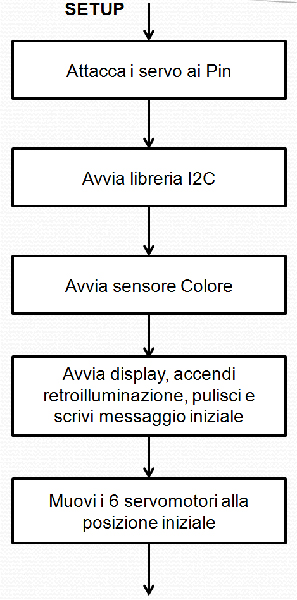
Il blocco di “Setup” dello sketch nelle linee da 30 a 53 si occupa di svolgere le funzioni di inizializzazione vere e proprie del progetto:
Il “Loop” dello sketch comprende le linee da 55 a 91 e ha lo scopo di ottemperare alle macro funzioni descritte dal diagramma seguente:
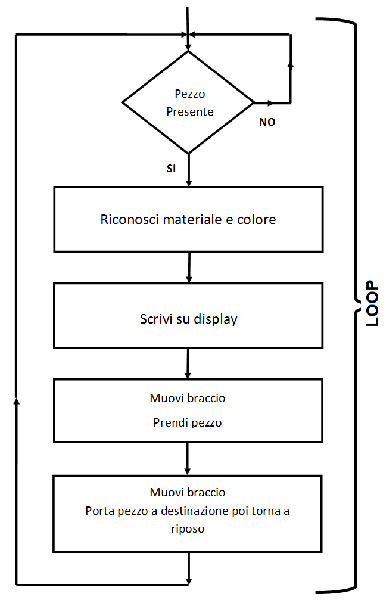
Nelle successive linee da 93 a 593 sono presenti i “comandi” (subroutine) che portano il pezzo a destinazione e poi riportano il braccio in posizione di riposo.
Il loro funzionamento dipende dalla coppia colore/materiale del cubetto variano principalmente i valori degli angoli di movimento dei vari servomotori.
Il riconoscimento del colore da parte del Robot Arm
Nicholas scrive:
Mi soffermo un attimo sul riconoscimento del colore del cubetto, che avviene nelle linee da 63 a 68:
63 // determina colore del pezzo mediante lettura del sensore di colore
64 if (RGBWSensor.getRed() > 65000 && RGBWSensor.getGreen() > 65000) giallo=1; else giallo=0;
65 if (RGBWSensor.getRed() > 35000 && RGBWSensor.getGreen() < 45000) rosso=1; else rosso=0;
66 if (RGBWSensor.getBlue() < 12000 && RGBWSensor.getWhite() < 40000) verde=1; else verde=0;
67 if (RGBWSensor.getBlue() > 12000 && RGBWSensor.getWhite() < 55000) blu=1; else blu=0;
68 if (RGBWSensor.getBlue() > 33000) {bianco=1; giallo=0;} else bianco=0;
dopo aver colorato i vari cubetti, li ho posizionati sul “tavolino” trasparente e osservando i valori misurati dal sensore.
Ho notato che questi variavano leggermente tra le sei facce del cubetto in funzione del materiale in quanto il legno possiede una superficie ruvida e l’alluminio una superficie liscia.
Empiricamente ho individuato delle soglie, notando che per riconoscere i cinque colori dei cubetti, devi usare le misure di due colori di luce riflessa selezionati in modo opportuno in funzione del colore del cubetto da riconoscere.
Lo sketch
Compreso il diagramma di flusso e le principali funzioni e strutture che il codice deve avere puoi leggere senza difficoltà il codice del robot arm di Nicholas:
// Arm Robot - Arduino nano
// by Maiocchi
#include <Servo.h> // carica la libreria Servo
#include <Wire.h> // carica la libreria del protocollo I2C
#include <veml6040.h> // carica la libreria del sensore di colore
#include <LiquidCrystal_I2C.h> // carica la libreria del display LCD 16x2
Servo myservo1; // crea oggetto servo per controllare il servo 1
Servo myservo2; // crea oggetto servo per controllare il servo 2
Servo myservo3; // crea oggetto servo per controllare il servo 3
Servo myservo4; // crea oggetto servo per controllare il servo 4
Servo myservo5; // crea oggetto servo per controllare il servo 5
Servo myservo6; // crea oggetto servo per controllare il servo 6
VEML6040 RGBWSensor; // crea oggetto sensore di colore
LiquidCrystal_I2C lcd(0x27,16,2); // crea oggetto display lcd indirizzo 0x27 16 caratteri 2 linee
int pinpezzo = 7; // digital pin usato dal sensore di presenza del pezzo
boolean pezzopresente; // cubo presente nel punto di presa e analisi pezzo (LOW)
int pinmetallo = 4; // digital pin usato dal sensore induttivo del metallo
boolean pezzometallo; // materiale usato per il cubo - metallo = LOW - legno = HIGH
boolean giallo; // colore del pezzo = giallo
boolean rosso; // colore del pezzo = rosso
boolean verde; // colore del pezzo = verde
boolean blu; // colore del pezzo = blu
boolean bianco; // colore del pezzo = bianco
void setup()
{
myservo1.attach(11); // attacca il servo1 al pin 11 dell'oggetto servo
myservo2.attach(10); // attacca il servo2 al pin 10 dell'oggetto servo
myservo3.attach(9); // attacca il servo3 al pin 9 dell'oggetto servo
myservo4.attach(6); // attacca il servo4 al pin 6 dell'oggetto servo
myservo5.attach(5); // attacca il servo5 al pin 5 dell'oggetto servo
myservo6.attach(3); // attacca il servo6 al pin 3 dell'oggetto servo
Wire.begin(); // avvia la libreria I2C
/* init RGBW sensor with: 320ms integration time - auto mode - color sensor enable */
RGBWSensor.setConfiguration(VEML6040_IT_320MS + VEML6040_AF_AUTO + VEML6040_SD_ENABLE);
lcd.init(); // inizializza il display
lcd.backlight(); // accende la retroilluminazione
lcd.clear(); // cancella lo schermo
lcd.print("Scegli un pezzo");
lcd.setCursor(0,1);
lcd.print("posalo alla base");
myservo1.write(92); // angolo posizione di riposo servo1
myservo2.write(79); // angolo posizione di riposo servo2
myservo3.write(94); // angolo posizione di riposo servo3
myservo4.write(140); // angolo posizione di riposo servo4
myservo5.write(90); // angolo posizione di riposo servo5
myservo6.write(80); // angolo posizione di riposo servo6
}
void loop()
{
pezzopresente = digitalRead(pinpezzo); // leggi sensore presenza pezzo
if (pezzopresente == LOW) // cubo presente nel punto di presa e analisi pezzo
{
delay(1000); // attenti stabilizzazione del sensore di colore
pezzometallo = digitalRead(pinmetallo); // leggi sensore induttivo del metallo
// determina colore del pezzo mediante lettura del sensore di colore
if (RGBWSensor.getRed() > 65000 && RGBWSensor.getGreen() > 65000) giallo=1; else giallo=0;
if (RGBWSensor.getRed() > 35000 && RGBWSensor.getGreen() < 45000) rosso=1; else rosso=0;
if (RGBWSensor.getBlue() < 12000 && RGBWSensor.getWhite() < 40000) verde=1; else verde=0;
if (RGBWSensor.getBlue() > 12000 && RGBWSensor.getWhite() < 55000) blu=1; else blu=0;
if (RGBWSensor.getBlue() > 33000) {bianco=1; giallo=0;} else bianco=0;
// scrive sul display colore e materiale del pezzo
if (pezzometallo == LOW && giallo == 1) scrivigiallometallo(); // scrive pezzo giallo metallo
if (pezzometallo == LOW && rosso == 1) scrivirossometallo(); // scrive pezzo rosso metallo
if (pezzometallo == LOW && verde == 1) scriviverdemetallo(); // scrive pezzo verde metallo
if (pezzometallo == LOW && blu == 1) scriviblumetallo(); // scrive pezzo blu metallo
if (pezzometallo == HIGH && giallo == 1) scrivigiallolegno(); // scrive pezzo giallo legno
if (pezzometallo == HIGH && rosso == 1) scrivirossolegno(); // scrive pezzo rosso legno
if (pezzometallo == HIGH && verde == 1) scriviverdelegno(); // scrive pezzo verde legno
if (pezzometallo == HIGH && blu == 1) scriviblulegno(); // scrive pezzo blu legno
if (bianco == 1) scriviscartapezzo(); // scrive scarta pezzo non colorato
prendi(); // muovi avanti braccio fino a punto di presa e prendi il pezzo
if (pezzometallo == LOW && giallo == 1) posagiallometallo(); // posa pezzo giallo metallo
if (pezzometallo == LOW && rosso == 1) posarossometallo(); // posa pezzo rosso metallo
if (pezzometallo == LOW && verde == 1) posaverdemetallo(); // posa pezzo verde metallo
if (pezzometallo == LOW && blu == 1) posablumetallo(); // posa pezzo blu metallo
if (pezzometallo == HIGH && giallo == 1) posagiallolegno(); // posa pezzo giallo legno
if (pezzometallo == HIGH && rosso == 1) posarossolegno(); // posa pezzo rosso legno
if (pezzometallo == HIGH && verde == 1) posaverdelegno(); // posa pezzo verde legno
if (pezzometallo == HIGH && blu == 1) posablulegno(); // posa pezzo blu legno
if (bianco == 1) scartapezzo(); // scarta pezzo non colorato
delay(1000);
}
}
void prendi() // muovi avanti braccio fino a punto di presa
{
myservo6.write(65); // apri pinza
for (int i=0; i<=62; i++)
{
if (i<61) myservo2.write(79+i); // abbassa braccio
if (i<27) myservo3.write(94-i); // chiude gomito
if (i<27) myservo4.write(140-i); // abbassa pinza
delay(17);
}
delay(300);
myservo6.write(120); // chiudi pinza
delay(300);
}
void torna() // riporta braccio in posizione di riposo
{
for (int i=0; i<=64; i++)
{
if (i<64) myservo2.write(144-i); // alza braccio
if (i<24) myservo3.write(70+i); // apre gomito
if (i<23) myservo4.write(118+i); // alza pinza
delay(15);
}
delay(2000);
myservo6.write(75); // apre pinza
}
void scartapezzo() // scarta pezzo non colorato gettandolo a lato
{
for (int i=0; i<=15; i++)
{
myservo2.write(144-i); // alza braccio
delay(15);
}
for (int i=0; i<=38; i++)
{
myservo1.write(93-i); // ruota braccio
delay(15);
}
for (int i=0; i<=21; i++)
{
myservo2.write(129+i); // abbassa braccio
delay(15);
}
delay(300);
myservo6.write(80); // apri pinza
delay(300);
for (int i=0; i<=70; i++)
{
if (i<40) myservo1.write(59+i); // ruota braccio
if (i<72) myservo2.write(149-i); // alza braccio
if (i<25) myservo3.write(70+i); // apre gomito
if (i<23) myservo4.write(118+i); // alza pinza
delay(15);
}
lcd.clear(); // cancella lo schermo
lcd.print("Scegli un pezzo");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print("posalo alla base");
}
void posagiallometallo() // posa pezzo giallo metallo
{
for (int i=0; i<=30; i++)
{
myservo2.write(144-i); // alza braccio
delay(20);
}
for (int i=0; i<=31; i++)
{
if (i<31) myservo1.write(93+i); // ruota braccio
if (i<20) myservo3.write(70-i); // chiude gomito
if (i<17) myservo4.write(118-i); // abbassa pinza
if (i<31) myservo5.write(90+i); // ruota pinza
delay(15);
}
for (int i=0; i<=22; i++)
{
myservo2.write(114+i); // abbassa braccio
delay(15);
}
delay(300);
myservo6.write(80); // apri pinza
delay(300);
for (int i=0; i<=30; i++)
{
myservo2.write(136-i); // alza braccio
delay(15);
}
for (int i=0; i<=43; i++)
{
if (i<33) myservo1.write(123-i); // ruota braccio
if (i<28) myservo2.write(106-i); // alza braccio
if (i<44) myservo3.write(51+i); // apre gomito
if (i<39) myservo4.write(102+i); // alza pinza
if (i<31) myservo5.write(120-i); // ruota pinza
delay(15);
}
lcd.clear(); // cancella lo schermo
lcd.print("Scegli un pezzo");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print("posalo alla base");
}
void posarossometallo() // posa pezzo rosso metallo
{
for (int i=0; i<=35; i++)
{
myservo2.write(144-i); // alza braccio
delay(20);
}
for (int i=0; i<=34; i++)
{
if (i<15) myservo1.write(93+i); // ruota braccio
if (i<33) myservo3.write(70-i); // chiude gomito
if (i<13) myservo4.write(118-i); // abbassa pinza
if (i<18) myservo5.write(90+i); // ruota pinza
delay(15);
}
for (int i=0; i<=18; i++)
{
myservo2.write(109+i); // abbassa braccio
delay(15);
}
delay(300);
myservo6.write(80); // apri pinza
delay(300);
for (int i=0; i<=20; i++)
{
myservo2.write(127-i); // alza braccio
delay(15);
}
for (int i=0; i<=58; i++)
{
if (i<13) myservo1.write(104-i); // ruota braccio
if (i<29) myservo2.write(107-i); // alza braccio
if (i<58) myservo3.write(38+i); // apre gomito
if (i<36) myservo4.write(106+i); // alza pinza
if (i<18) myservo5.write(107-i); // ruota pinza
delay(15);
}
lcd.clear(); // cancella lo schermo
lcd.print("Scegli un pezzo");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print("posalo alla base");
}
void posaverdemetallo() // posa pezzo verde metallo
{
for (int i=0; i<=35; i++)
{
myservo2.write(144-i); // alza braccio
delay(20);
}
for (int i=0; i<=34; i++)
{
if (i<10) myservo1.write(92-i); // ruota braccio
if (i<33) myservo3.write(70-i); // chiude gomito
if (i<13) myservo4.write(118-i); // abbassa pinza
if (i<10) myservo5.write(90-i); // ruota pinza
delay(15);
}
for (int i=0; i<=16; i++)
{
myservo2.write(109+i); // abbassa braccio
delay(15);
}
delay(300);
myservo6.write(80); // apri pinza
delay(300);
for (int i=0; i<=20; i++)
{
myservo2.write(125-i); // alza braccio
delay(15);
}
for (int i=0; i<=58; i++)
{
if (i<16) myservo1.write(83+i); // ruota braccio
if (i<27) myservo2.write(105-i); // alza braccio
if (i<58) myservo3.write(38+i); // apre gomito
if (i<36) myservo4.write(106+i); // alza pinza
if (i<15) myservo5.write(81+i); // ruota pinza
delay(15);
}
lcd.clear(); // cancella lo schermo
lcd.print("Scegli un pezzo");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print("posalo alla base");
}
void posablumetallo() // posa pezzo blu metallo
{
for (int i=0; i<=30; i++)
{
myservo2.write(144-i); // alza braccio
delay(20);
}
for (int i=0; i<=29; i++)
{
if (i<27) myservo1.write(93-i); // ruota braccio
if (i<24) myservo3.write(70-i); // chiude gomito
if (i<17) myservo4.write(118-i); // abbassa pinza
if (i<29) myservo5.write(90-i); // ruota pinza
delay(15);
}
for (int i=0; i<=18; i++)
{
myservo2.write(114+i); // abbassa braccio
delay(15);
}
delay(300);
myservo6.write(80); // apri pinza
delay(300);
for (int i=0; i<=30; i++)
{
myservo2.write(132-i); // alza braccio
delay(15);
}
for (int i=0; i<=43; i++)
{
if (i<33) myservo1.write(67+i); // ruota braccio
if (i<24) myservo2.write(102-i); // alza braccio
if (i<50) myservo3.write(47+i); // apre gomito
if (i<39) myservo4.write(102+i); // alza pinza
if (i<32) myservo5.write(62+i); // ruota pinza
delay(15);
}
lcd.clear(); // cancella lo schermo
lcd.print("Scegli un pezzo");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print("posalo alla base");
}
void posagiallolegno() // posa pezzo giallo legno
{
for (int i=0; i<=10; i++)
{
myservo2.write(141-i); // alza braccio
delay(15);
}
for (int i=0; i<=34; i++)
{
myservo2.write(131-i); // alza braccio
myservo3.write(68-i); // chiude gomito
delay(15);
}
for (int i=0; i<=41; i++)
{
if (i<42) myservo1.write(92+i); // ruota braccio
if (i<11) myservo3.write(34-i); // chiude gomito
if (i<6) myservo4.write(114-i); // abbassa pinza
if (i<40) myservo5.write(90+i); // ruota pinza
delay(15);
}
for (int i=0; i<=19; i++)
{
myservo2.write(97+i); // abbassa braccio
delay(15);
}
delay(300);
myservo6.write(75); // apri pinza
delay(300);
for (int i=0; i<=30; i++)
{
myservo2.write(117-i); // alza braccio
delay(15);
}
for (int i=0; i<=77; i++)
{
if (i<38) myservo1.write(129-i); // ruota braccio
if (i<10) myservo2.write(87-i); // alza braccio
if (i<71) myservo3.write(24+i); // apre gomito
if (i<32) myservo4.write(109+i); // alza pinza
if (i<40) myservo5.write(129-i); // ruota pinza
delay(15);
}
lcd.clear(); // cancella lo schermo
lcd.print("Scegli un pezzo");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print("posalo alla base");
}
void posarossolegno() // posa pezzo rosso legno
{
for (int i=0; i<=15; i++)
{
myservo2.write(144-i); // alza braccio
delay(15);
}
for (int i=0; i<=50; i++)
{
myservo2.write(129-i); // alza braccio
myservo3.write(70-i); // chiude gomito
delay(15);
}
for (int i=0; i<=21; i++)
{
if (i<21) myservo1.write(93+i); // ruota braccio
if (i<11) myservo3.write(20-i); // chiude gomito
if (i<8) myservo4.write(118-i); // abbassa pinza
if (i<21) myservo5.write(90+i); // ruota pinza
delay(15);
}
for (int i=0; i<=32; i++)
{
myservo2.write(79+i); // abbassa braccio
delay(15);
}
delay(300);
myservo6.write(80); // apri pinza
delay(300);
for (int i=0; i<=20; i++)
{
myservo2.write(111-i); // alza braccio
delay(15);
}
for (int i=0; i<=85; i++)
{
if (i<23) myservo1.write(113-i); // ruota braccio
if (i<13) myservo2.write(91-i); // alza braccio
if (i<86) myservo3.write(10+i); // apre gomito
if (i<31) myservo4.write(111+i); // alza pinza
if (i<21) myservo5.write(110-i); // ruota pinza
delay(15);
}
lcd.clear(); // cancella lo schermo
lcd.print("Scegli un pezzo");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print("posalo alla base");
}
void posaverdelegno() // posa pezzo verde legno
{
for (int i=0; i<=15; i++)
{
myservo2.write(144-i); // alza braccio
delay(15);
}
for (int i=0; i<=50; i++)
{
myservo2.write(129-i); // alza braccio
myservo3.write(70-i); // chiude gomito
delay(15);
}
for (int i=0; i<=19; i++)
{
if (i<14) myservo1.write(93-i); // ruota braccio
if (i<12) myservo3.write(20-i); // chiude gomito
if (i<8) myservo4.write(118-i); // abbassa pinza
if (i<13) myservo5.write(90-i); // ruota pinza
delay(15);
}
for (int i=0; i<=32; i++)
{
myservo2.write(79+i); // abbassa braccio
delay(15);
}
delay(300);
myservo6.write(80); // apri pinza
delay(300);
for (int i=0; i<=20; i++)
{
myservo2.write(111-i); // alza braccio
delay(15);
}
for (int i=0; i<=85; i++)
{
if (i<19) myservo1.write(80+i); // ruota braccio
if (i<13) myservo2.write(91-i); // alza braccio
if (i<86) myservo3.write(10+i); // apre gomito
if (i<31) myservo4.write(111+i); // alza pinza
if (i<17) myservo5.write(78+i); // ruota pinza
delay(15);
}
lcd.clear(); // cancella lo schermo
lcd.print("Scegli un pezzo");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print("posalo alla base");
}
void posablulegno() // posa pezzo blu legno
{
for (int i=0; i<=15; i++)
{
myservo2.write(144-i); // alza braccio
delay(15);
}
for (int i=0; i<=34; i++)
{
myservo2.write(129-i); // alza braccio
myservo3.write(70-i); // chiude gomito
delay(15);
}
for (int i=0; i<=36; i++)
{
if (i<36) myservo1.write(93-i); // ruota braccio
if (i<15) myservo3.write(36-i); // chiude gomito
if (i<15) myservo4.write(118-i); // abbassa pinza
if (i<35) myservo5.write(90-i); // ruota pinza
delay(15);
}
for (int i=0; i<=18; i++)
{
myservo2.write(95+i); // abbassa braccio
delay(15);
}
delay(300);
myservo6.write(80); // apri pinza
delay(300);
for (int i=0; i<=20; i++)
{
myservo2.write(113-i); // alza braccio
delay(15);
}
for (int i=0; i<=83; i++)
{
if (i<41) myservo1.write(59+i); // ruota braccio
if (i<15) myservo2.write(93-i); // alza braccio
if (i<83) myservo3.write(12+i); // apre gomito
if (i<32) myservo4.write(110+i); // alza pinza
if (i<38) myservo5.write(56+i); // ruota pinza
delay(15);
}
lcd.clear(); // cancella lo schermo
lcd.print("Scegli un pezzo");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print("posalo alla base");
}
void scrivigiallometallo()
{
lcd.clear(); // cancella lo schermo
lcd.print(" - GIALLO -");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print(" - METALLO -");
}
void scrivirossometallo()
{
lcd.clear(); // cancella lo schermo
lcd.print(" - ROSSO -");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print(" - METALLO -");
}
void scriviverdemetallo()
{
lcd.clear(); // cancella lo schermo
lcd.print(" - VERDE -");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print(" - METALLO -");
}
void scriviblumetallo()
{
lcd.clear(); // cancella lo schermo
lcd.print(" - BLU -");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print(" - METALLO -");
}
void scrivigiallolegno()
{
lcd.clear(); // cancella lo schermo
lcd.print(" - GIALLO -");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print(" - LEGNO -");
}
void scrivirossolegno()
{
lcd.clear(); // cancella lo schermo
lcd.print(" - ROSSO -");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print(" - LEGNO -");
}
void scriviverdelegno()
{
lcd.clear(); // cancella lo schermo
lcd.print(" - VERDE -");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print(" - LEGNO -");
}
void scriviblulegno()
{
lcd.clear(); // cancella lo schermo
lcd.print(" - BLU -");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print(" - LEGNO -");
}
void scriviscartapezzo()
{
lcd.clear(); // cancella lo schermo
lcd.print(" - BIANCO -");
lcd.setCursor(0,1); // vai a riga successiva
lcd.print(" - SCARTARE -");
}
Nicholas non ha descritto linea per linea il progetto in quanto la descrizione del paragrafo precedente dovrebbe esserti sufficiente, qualora desiderassi maggiori dettagli e spiegazioni ti consiglio di scrivere un commento.
Nicholas è disponibile a rispondere a tutti i tuoi dubbi e chiarire le parti di codice più complesse.
Il video del robot arm di Nicholas
Ti ripropongo il video realizzato da Nicholas del suo robot Arm in funzione:

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza