
la Delta 3d printer K250 elettronica Fsr è giunta alla quinta puntata sempre dedicata all’elettronica ed in particolare agli FSR ( Force Sending Resistor )
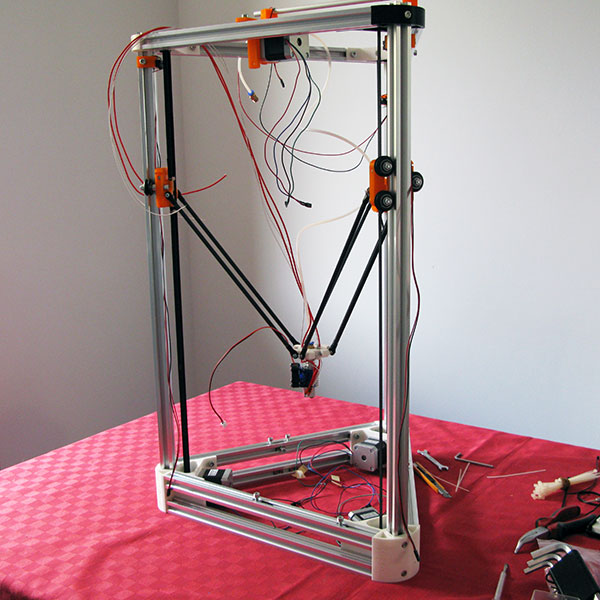
Fai un passo indietro nella costruzione della stampate modello Delta e avrai letto che questo modello di stampante 3D è tra le più complesse da calibrare a causa della sua stessa forma.
In pratica se su una cartesiana il calcolo e la correzione di eventuali imperfezioni di allineamento della testina rispetto al piano puoi correggerle direttamente agendo sui parametri dell’asse che si discosta dal piano o regolando uno dei 4 angoli del piano ( ovviamente sempre che il tuo piano sia quadrato o rettangolare ) con la Delta 3d printer tutto è legato alle coordinate polari ed al riferimento tra bracci obliqui e torri verticali.
Cercando in internet ho trovato diverse soluzioni che puoi adottare per utilizzare la funzione di auto calibrazione offerta dal firmware: si tratta sia di sistemi elettromeccanici, sia basati su ausili elettronici come gli FSR.
Cos’è un FSR
Non ho la pretesa di spiegarti cosa sia un FSR e ti rimando alla lettura della pagina Wiki da cui l’ho appresa anche io: wiki fsr

Volndo semplificare al massimo posso dire che si tratta di sensori che variano la loro resistenza in funzione del peso applicato sulla loro superficie.
Perché una Delta 3d printer K250 elettronica Fsr
Gli FSR offrono due caratteristiche interessanti:
- possono essere installati in modo nascosto sotto il piano di stampa
- non appesantiscono l’estrusore come accade invece per l’auto level elettromeccanico
E’ pur vero che ci sono soluzioni per l’auto level elettromeccanico che ti permettono di sganciare il sistema meccanico dopo aver eseguito la calibrazione.
Inoltre ci sono altri motivi per cui ho scelto gli FSR:
- il progetto che ho seguito prevedeva già dei supporti per il piano con inclusi gli FSR
- le cose non scontate e che mi stimolano la ricerca e l’approfondimento solleticano sempre la mia curiosità
I supporti per gli FSR
I supporti per gli FSR e per il piano sono già presenti tra i file del progetto della Delta 3d printer K250:
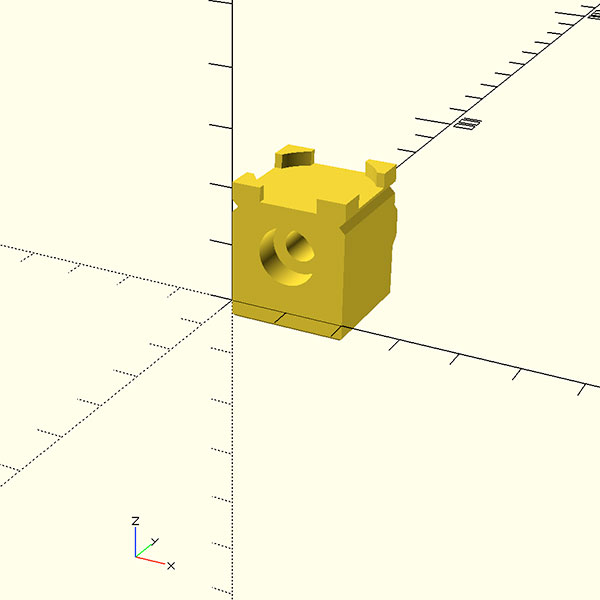
la foto è presa da openScad importando l’STL rilasciato con il progetto.
Montaggio dei supporti FSR
il montaggio dei sensori FSR nei supporti è semplice in quanto è necessario solo avere a disposizione del sughero da 2mm di spessore che puoi acquistare in un brico center e che devi tagliare in modo circolare del diametro di circa 14mm
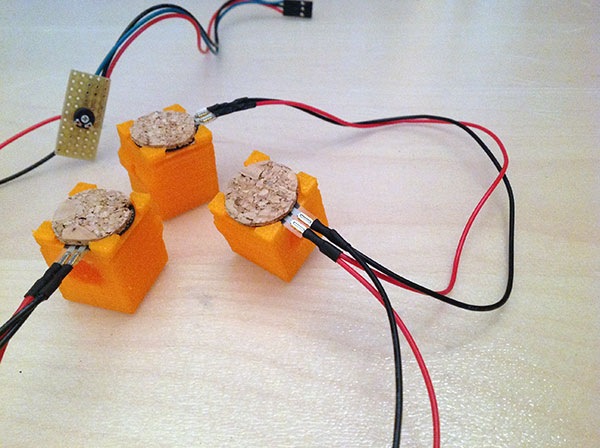
ed applicarli nella parte superiore dell’FSR con la doppia funzione di sollevare leggermente il piano rispetto ai supporti FSR ed isolare il PLA, in cui sono stampati i miei supporti, dal piano per usarlo in modo riscaldato.
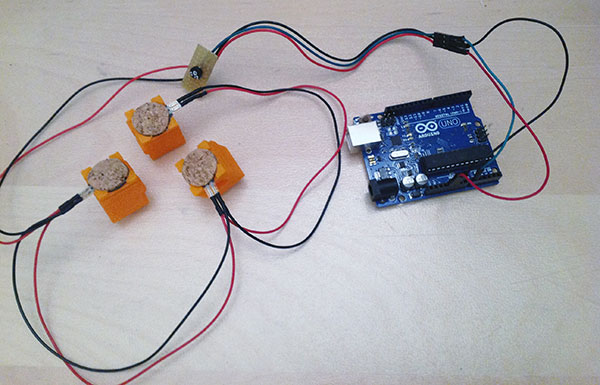
Collegamento degli FSR
Il collegamento degli FSR non è complesso in quanto è sufficente che essi siano colelgati tutti in parallelo tra loro, come puoi vedere nella figura sopra.
Il collegamento degli FSR alla RAMPS è invece più complesso in quanto gli FSR sono delle resistenze variabili in funzione del peso applicato e non dei semplici pulsanti o microswitch.
Il firmware Marlink che ho utilizzato per il controllo della delta non supporta i sensori di questo tipo, si aspetta di utilizzare uno dei pin di endstop liberi per rilevare la chiusura del contatto necessario all’auto calibrazione.
Ho cercato in internet la soluzione trovando soluzioni differenti alcune delle quali basate su ATTiny e firmware in grado di rilevare la pressione sugli FSR e tramutarla in un impulso 0 o 1 ( Low o High ) per la RAMPS e per il Firmware della Delta 3d printer K250 elettronica Fsr.
Ho scelto di adottare una soluzione semplice dal punto di vista elettronico basandomi su un potenziometro connesso come partitore di tensione in Pull-up/Pull-down ed ho disegnato questo semplice schema:
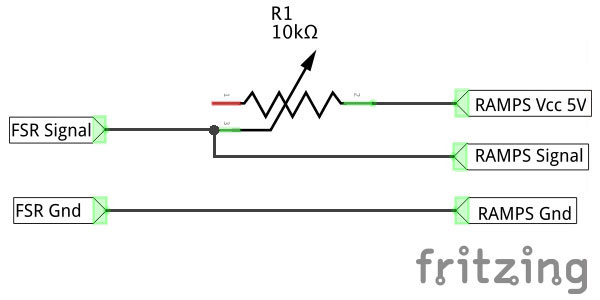
per poi realizzare su una basetta millefori il congegno di regolazione della sensibilità.
In questo modo puoi regolare la senibilità del piano in modo che il peso applicato al piano determini se il firmware della Delta 3d printer K250 elettronica Fsr deve ricevere un segnale di tipo LOW o HIGH.
Questo stratagemma mi ha consentito in fase di taratura e auto calibrazione della stampante di cambiare il vetro ed il piano di stampa senza difficoltà.
Montaggio del partitore FSR
Per alloggiare il partitore FSR nella stampante ho modificato il file STL del progetto originale aggiungendo il foro e le sedi per fissare il circuito di regolazione in modo che anche in fasi successive di calibrazione o cambiamenti tu possa facilmente agire sulla regolazione:
Trovi tutti i file pubblicati su Thingiverse liberamente scaricabili.
Se vuoi editarlo ricordati di inserire nella stessa cartella scaricata i file originali della K250 Kossel.
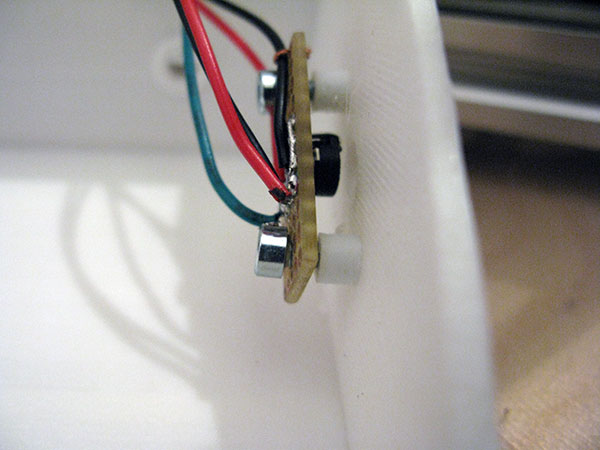
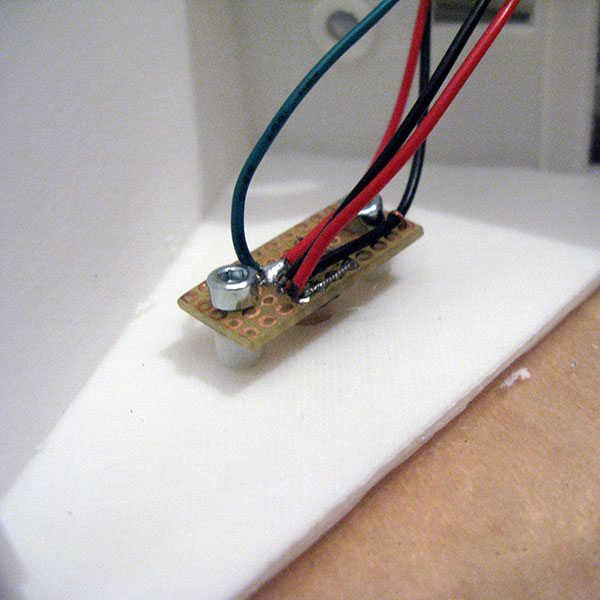
Il risultato finale del montaggio dei soli FSR sui supporti per la Delta 3d printer K250 elettronica Fsr dovrebbe essere simile a quanto mostrato in figura:


 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
4 commenti
1 ping
Vai al modulo dei commenti
Pardon, invio nuovamente il commento senza sketch!
Ciao mi chiamo Carlo ( non so se ti ricordi di me: l’ anno scorso richiesi la tua consulenza circa un progetto con arduino che necessitava di alcune suonerie natalizie, circa 31, che tu gentilmente mi hai corretto ed in seguito pubblicato sul sito. Ti chiedo cortesemente un tuo parere circa un piccolo progetto di robot natalizio che utilizza, in elenco:
1) una scheda Arduino uno R3;
2) una scheda di controllo motori Adafruit Motor Shield;
3) un sensore ad ultrasuoni SRF04;
4) due motori dc;
5) un piccolo speaker per suonerie;
Il problema è che quando il codice si limita a pilotare i motori in funzione dei valori restituiti dal sensore (tipo: ‘arresta i motori quando il sensore da una lettura inferiore ad un dato valore’ ) tutto va bene. Dal momento in cui ho deciso di utilizzare l’ elenco di suonerie che tu già conosci, tramite la funzione playRTTTL(), i motori si bloccano. Ho verificato che il blocco dei motori è attivato introducendo l’ istruzione ‘tone1.begin(13)’ dove 13 è l’ unico pin, assieme al 2, che non viene utilizzato dalla scheda motori (come precisato nel tutorial della scheda). Ho provato a usare il pin 2 ed il pin analogico A0 (trasformato in digitale) ma .. niente .. non si muove niente. Spero che tu mi possa dare una traccia per sbloccare questa situazione. Infinite grazie
Carlo
Autore
Ciao Carlo,
non ho mai provato tutte le shield di cui scrivi per cui potrei sbagliare.
Immagino che il problema principale sia dovuto al modo in cui arduino usa i TIMER, ho scritto un articolo su cosa sono, ed è possibile che si verifichi un conflitto tra le librerie che utilizzi.
Sarebbe necessaria una analisi approfondita ed ad un livello elevato di programmazione.
Probabilmente la soluzione migliore è separare il progetto on due arduino:
1. si occupa delle suonerie
2. si occupa dei sensori e motori
Quando vuoi che le suonerie si avviino mandi HIGH un pin, ad esempio il 13, e lo leggi sull’altro arduino che fa partire le suonerie.
Ciao Mauro,
mi chiamo Thomas e sto costruendo una delta kossel con arduino due e radds 1.5 come schield.
Seguo da un pò il tuo blog ed ho imparato molto finora a dire il vero però
non sono un esperto di elettronica bensì un elettricista quindi ti chiedo:
Per usare i sensori Fsr su arduino due che legge in ingresso 3,3 V come posso fare? Sono costreto ad usare un potenziometro o mi è sufficente una resistenza?
Disporrei in alternativa di un sensore ottico tipo Pibot che lavora però mi pare di aver capito a 5V.
Secondo te con un convertitore bidirezioale potrebbe funzionare o mi sfalsa i valori di lettura in ingresso perchè magari mi perde la risoluzione del segnale.
Insomma detta in breve, ho bisogno di una sonda di Z per la mia Delta e non ho la possibilita di montare un endstop meccanico accanto all’estrusore. Come posso fare?
Ti ringrazio in anticipo per la risposta. PS credo che userò Repetier Host.
Grazie Thomas
Autore
Ciao Thomas,
non conoscevo la RADDS 1.5, grazie per la segnalazione.
In merito agli FSR si comportano come delle resistenze variabili e solitamente il FW li legge come interruttori, quindi se usi lo stesso circuito che ho realizzato, alimentandoli a 3.3v, non dovrebbe variare di molto il funzionamento.
Uso il condizionale in quanto non ho mai provato la tua configurazione.
Sicuramente prima di usarli con la RADDS o altra scheda di controllo, fossi in te, li controllerei con semplici sketch di lettura analogica e magari con un tester ed oscilloscopio per evitare danni alle shield.
[…] collega tutti i fili al centro al circuito di taratura che ho presentato nell’articolo dedicato agli FSR per la Delta Kossel […]