
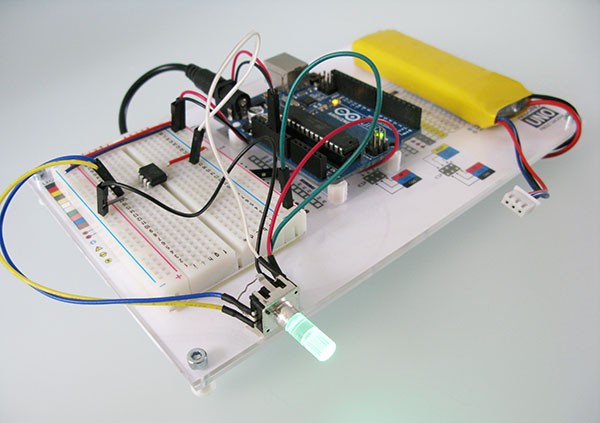
Continuando a fare esperimenti ho provato l’AtTiny85 Encoder delegando all’AtTiny85 la lettira di un encoder rotativo.
Gli encoder sono affascinanti e complessi allo stesso tempo oltre che onerosi dal punto di vista dei pin disponibili per il loro controllo da parte di Arduino.
Warning!
Esperimento che richiede una conoscenza avanzata della programmazione e dell’elettronica, registri, codice binario ecc..
Ho trattato in passato l’argomento encoder rotativi ( puoi leggerlo qui ) per spiegare la teoria con la quale è possibile leggere il valore di rotazione ed il verso.
Come hai letto un aspetto importante nella lettura di un encoder è la necessità di pin di interrupt che come sai sono solo 2 in un arduino / Genuino uno ( pin 2 e 3 ) da cui il limite di poter leggere al massimo un solo encoder.
Sperimentando con l’AtTiny85 Encoder leggerai che è possibile utilizzare questo piccolo microcontrollore per leggere l’encoder ed il pulsante installato in alcune versioni di encoder trasferendo solo il valore ad un arduino o genuino uno connesso mediante i2c al tuo AtTiny85 Encoder.
Schema dei collegamenti AtTiny85 Encoder
Il primo passo per comprendere come puoi collegare il tuo Attiny85 Encoder è comprendere il pinout dell’Attiny85 stesso:
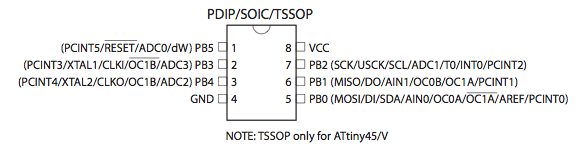
come vedi hai a disposizione 5 pin PB0-PB4 da utilizzare e controllare tramite codice, avrai notato che è presente anche un PB5 con funzione RESET che io ho scelto di utilizzare proprio con questa funzione per cui non è incluso nello schema di collegamento dell’Attiny85 Encoder:
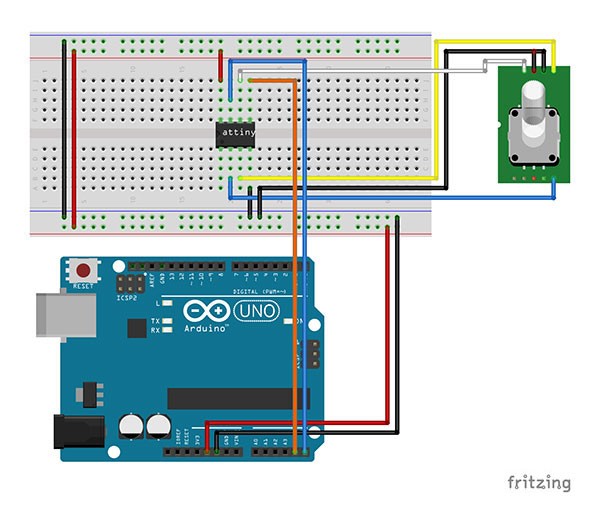
collega i pin A e B dell’encoder a quadratura ai pin PB3 e PB4 dell’Attiny e lo switch dell’encoder al pin PB1.
Per la connessione I2C tra Attiny85 Encoder e Arduino usa i pin PB0 connesso ad A4 e PB2 ad A5, il resto dovrebbe essere tutto chiaro.
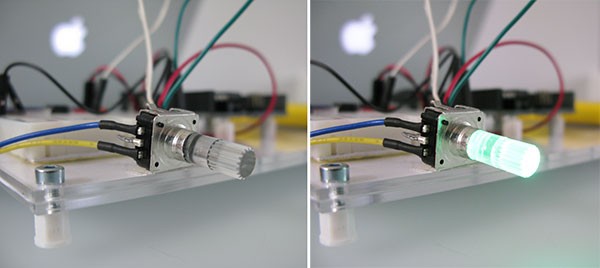
L’encoder che ho utilizzato per questo esperimento è del tipo con cursore trasparente e illuminazione bicolore rosso/verde:
Programmazione dell’Attiny85 Encoder come master
Ho scelto di usare l’Attiny in modalità master ed arduino, o genuino, in modalità slave i2c per semplificare il codice lato arduino in questo esperimento.
Sull’Attiny85 Encoder puoi caricare lo sketch:
/* Tiny85 encoder
*
* pin I2C: SDA = 5 = PB0; SCL = 7 = PB2
* pin Enc: A = PB3; B = PB4; Switch = PB1
*
*/
#include <TinyWireM.h>
#include "avr/interrupt.h";
#define TARGET_ADDR 0x08
#define encA 3
#define encB 4
#define swtc 1
volatile byte currentValue = 0;
volatile int lastEncoded = 0;
volatile byte lastValue = 0;
volatile byte lastSwitch = 0;
void setup() {
TinyWireM.begin();
pinMode(encA, INPUT_PULLUP);
pinMode(encB, INPUT_PULLUP);
pinMode(swtc, INPUT_PULLUP);
digitalWrite(encA, HIGH);
digitalWrite(encB, HIGH);
GIMSK = 0b00100000; // Enable pin interrupts
PCMSK = 0b00011010; // Enable pin interrupt PB3,PB4,PB1
sei(); // Turn on interrupts
}
void loop() {
byte currentSwitch = digitalRead(swtc);
if ((lastValue != currentValue)||(lastSwitch != currentSwitch)) {
TinyWireM.beginTransmission(TARGET_ADDR);
TinyWireM.send(currentValue);
TinyWireM.send(currentSwitch);
TinyWireM.endTransmission();
lastValue = currentValue;
lastSwitch = currentSwitch;
}
delay(10);
}
ISR(PCINT0_vect) {
byte MSB = digitalRead(encA); //MSB = most significant bit
byte LSB = digitalRead(encB); //LSB = least significant bit
int encoded = (MSB << 1) |LSB; //converting the 2 pin
//value to single number
int sum = (lastEncoded << 2) | encoded; //adding it to
//the previous
//encoded value
if(sum==0b1101||sum==0b0100||sum==0b0010||sum==0b1011) currentValue++;
if(sum==0b1110||sum==0b0111||sum==0b0001||sum==0b1000) currentValue--;
lastEncoded = encoded; //store this value for next time
}
che per la maggior parte del codice è identico a quello che hai già letto nell’articolo dedicato all’encoder con arduino, tuttavia ci sono alcune modifiche che ti evidenzio:
linea 08: includi la libreria TinyWireM.h che permette all’AtTiny85 di diventare Master nella comunicazione I2C
linea 09: includi una libreria nativa avr/interrupt.h dell’Attyny85 e delle istruzioni AVR;
linee 11-14: definisci l’indirizzo I2C della parte Slave a cui l’Attiny85 Encoder deve inviare i valori conteggiati e i pin a cui hai connesso i pin A,B e switch dell’encoder;
linee 16-19: definisci delle variabili che userai per memorizzare i valori ricevuti dall’encoder;
linea 23: inizializza l’istanza Master per l’AtTiny85;
linee 25-29: imposta la modalità PULLUP per i pin a cui è collegato l’encoder e lo switch e poni HIGH le uscite A e B dell’encoder per attivare le resistenze di PULLUP definite;
linea 31: imposta il registro dell’Attiny85 in modo che attivi la modalità di interrupt sui pin che gli indicherai;
linea 32: imposta i pin su cui desideri sia attivato l’interrupt, per farlo usi i codici binari con una maschera in cui il valore 1 indica i pin che devono essere abilitati come interrupts. Nella maschera proposta hai 00011010 corrispondente ai pin PB1,PB3 e PB4
linea 33: richiama la funzione sei() della libreria AVR per impostare l’AtTiny85 con i pin di interrupts come da maschera;
linea 37: definisci la variabile di tipo byte currentSwitch in cui memorizzerai i valori digitali letti sul pin switch ossia PB1;
linea 39: controlla se il valore corrente rilevato dall’encoder o dallo switch sia differente dal valore precedente, in caso di differenze procedi ad inviare il valore variato;
linee 40-43: apri la comunicazione I2C verso l’indirizzo Target definito alla linea 11 e invia un byte (0-255) come valore letto sull’encoder ed un byte per il valore letto sullo switch;
linee 45-46: imposta le variabili di tipo last* con i valori correnti per evitare l’invio di valori identici;
linee 51-65: sono identiche a quanto già descritto nei precedenti articoli dedicati agli encoder e l’unica parte rilevante è data dalle linee 61 e 62 in cui in funzione del verso di rotazione dell’encoder incrementi o decrementi il valore della variabile currentValue che serve al loop() per definire il valore da inviare all’arduino o altro MCU usato come slave.
Nel prossimo articolo leggerai come realizzare e usare un semplice ricevitore I2C con arduino o genuino uno per visualizzare sul monitor seriale i valori ricevuti dall’AtTiny85 encoder i2c.
Il video con AtTiny85 master e Arduino Slave
ecco il video in cui il monitor seriale visualizza i valori provenineti dall’encoder:

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
2 ping
[…] corso degli ultimi articoli dedicati all’Attiny85 e l’encoder hai letto come usare quest’ultimo come master ed arduino come […]
[…] Attiny85 encoder master […]