
Il 10 DOF ( Degrees Of Freedom ) è un insieme di sensori, montati su una stessa scheda, in grado di restituirti ciascuno un valore relativo alla propria posizione nello spazio.
Descritta in questo modo la definizione di Degrees Of Freedom ( gradi di libertà ) è alquanto complessa ma puoi trovare sul sito playground arduino questa pagina:
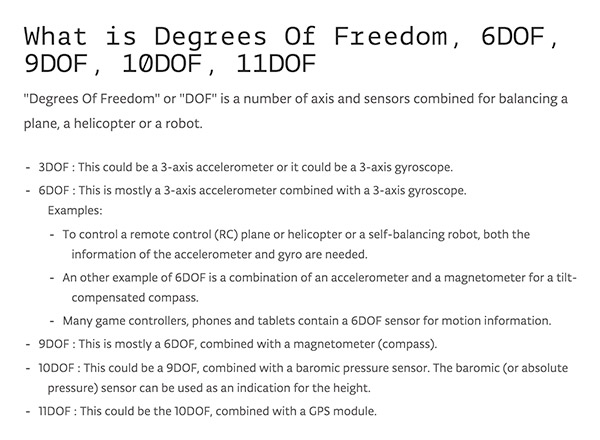
in cui è descritto non solo il significato del numero che precede tale sigla ma anche come collegare tali sensori ad arduino.
Come leggi nella figura riportata sopra il numero che precede la sigla DOF indica il numero ed il tipo di sensore presente, o meglio, indica la tipologia di sensore e non il modello di chip specifico.
Il mio 10DOF, acquistato da robotics-3d.com, è un 10 DOF Drotek costruito con i sensori:
- MPU-6050 (Motion Processing Unit) con 6 gradi di libertà 3 per l’accellerometro e 3 per il giroscopio in I2C;
- HMC5883L magnetometro a 3 assi con risoluzione 12bit ADC che comunica con arduino in I2C;
- MS5611-01BA altimetro di precisione che avverte variazioni di 10cm con una risoluzione di 24bit ADC e interfaccia I2C;
Come funziona il 10 DOF
come hai letto nel paragrafo precedente l’IMU 10 DOF è stato realizzato con tutti sensori in grado di comunicare mediante protocollo I2C che ti consente di:
- usare soli 2 fili ( oltre all’alimentazione ) per ricevere le informazioni di tutti i sensori presenti sul componente;
- ottenere una risoluzione da ogni singolo ADC superiore a quella disponibile sull’arduino che è solo di 10bit
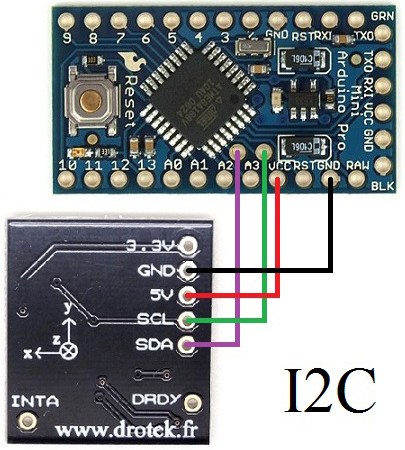
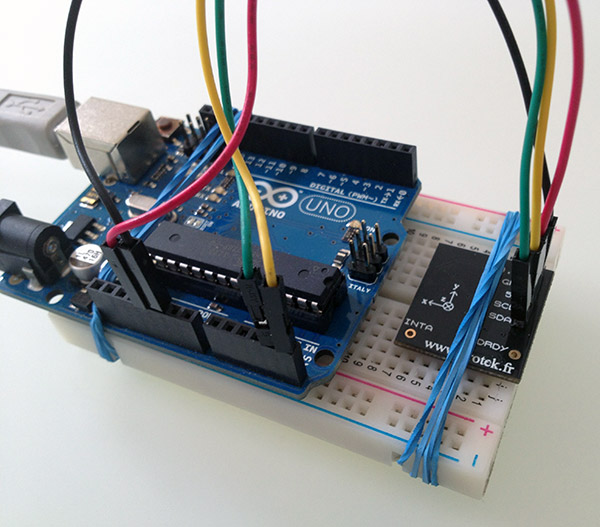
Collega l’IMU 10 DOF ad arduino seguendo lo schema che lo stesso produttore propone e che trovi su molti siti on-line che parlano di questo sensore:
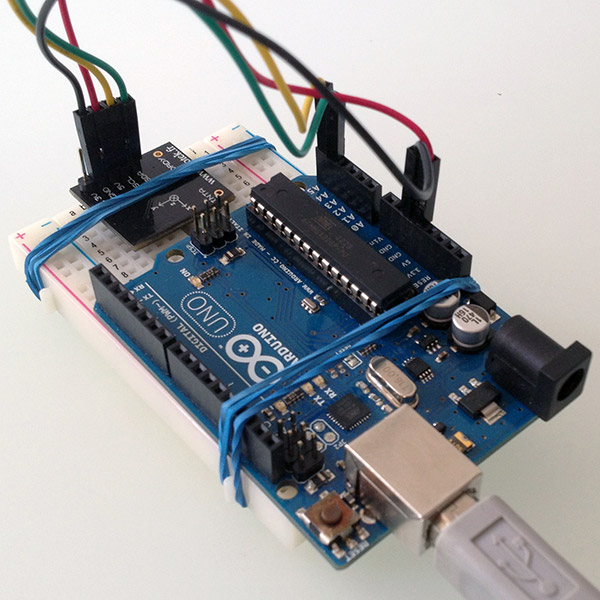
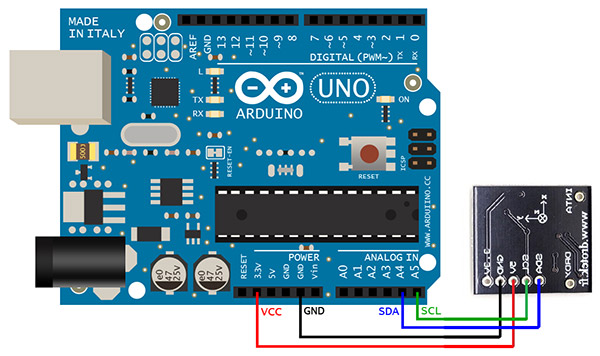
probabilmente la prima volta vorrai testare il tuo sensore con un arduino Uno come ho fatto io e quindi sarebbe meglio tu seguissi questo tipo di collegamenti:
L’altra informazione fondamentale che devi conoscere è quella relativa ad ogni indirizzo di comunicazione I2C essendo 3 sensori differenti ognuno avrà un suo indirizzo.
L’informazione l’ho trovata sia sul sito del produttore sia del rivenditore:
I2C address of sensors:
MPU6050 -> 105
MS5611 -> 119
HMC5883 -> 30
che dovrai tradurre in esadecimale in quanto è quella la codifica definita per gli indirizzi I2C del 10 DOF e non solo:
MPU6050 -> 0x69
MS5611 -> 0x77
HMC5883 -> 0x1E
FreeIMU di Fabio Vareano
Fabio Varesano ha scritto un software per il dispositivo FreeIMU davvero interessante composto da due componenti:
- codice arduino
- codice processing
probabilmente ti sei già imbattuto in questa immagine:
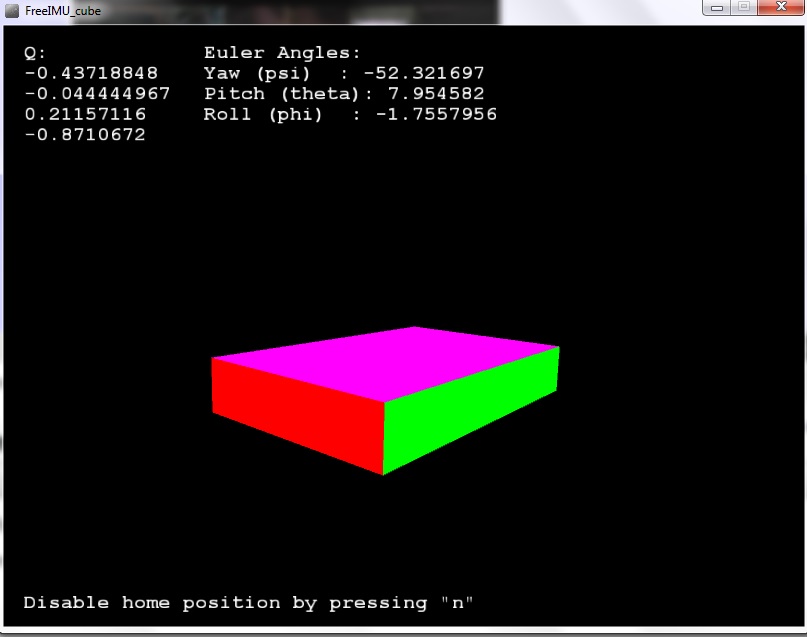
è l’interfaccia in processing FreeIMU Cube realizzata da Varesano per renderizzare un cubo virtuale che si muove, inclinandosi e ruotando, così come il tuo 10 DOF, o anche solo 6 DOF, si sposta nello spazio.
Purtroppo Fabio è scomparso qualche anno fa e non ha potuto supportare tutti i chip esistenti e le evoluzioni che gli IMU hanno avuto in questi anni. Tuttavia il suo software è incredibilmente valido e solo cambiando la componente sw su arduino, lo sketch, puoi usare FreeIMU Cube con qualsiasi sensore accelerometro e giroscopio.
Sketch di test dell’MPU6050
In un primo test ho voluto provare solo l’accellerometro ed il giroscopio e per questo mi sono limitato al solo uso dei promi 6 DOF.
Se esegui anche tu la stessa prova, magari con uno sketch di esempio trovato nel playground o il learning arduino ti accorgeari che i valori restituiti sono molti e scorrono velocemente sul video al limite del poter comprendere cosa veramente stia succedendo.
La maggior parte del tempo investito in questi giorni mi è servito per trovare uno sketch che potesse supportare il 10DOF ed essere usato con FreeIMU Cube.
Dopo alcuni giorni di ricerca ho trovato questo sketch:
//MPU-6050 6-axis DMP Demo v0.01
//by Noah Zerkin in 2011
//noazark AT gmail DOT com
//This sketch is not intended to be a general purpose library for the MPU-6050. It isn't object
//oriented and can't be used with multiple sensors until it is adapted for such. It is simply
//a demo sketch intended to reproduce the behavior of the Invensense Embedded MotionApps demo
//for the Atmel AVR UC3-A3 Xplained board for use with the Invensense Teapot demo. You can download
//the TeaPot and Pointer Demo App Visual C++ solution from the Invensense Developers Corner.
//Oh yeah, this has only been tested with MPU-6050 Rev C silicon. If you're using a Rev A eval board,
//I make no promise that this version will work.
//More useful code is coming soon.
//And you may need to start the teapot demo twice for it to run. I'm not yet sure what's up with that.
//I'm not attaching a formal license to this code. But I did put many hours of hard work into it,
//so if you make use of it, a shout out or some other sort of acknowledgement would be lovely.
#include <Wire.h>
#include <avr/interrupt.h>
#include <avr/pgmspace.h>
#define MPU_ADDR 0x69
#define MEM_START_ADDR 0x6E
#define MEM_R_W 0x6F
long lastRead = 0;
byte processed_packet[8];
byte received_packet[50];
byte temp = 0;
byte fifoCountL = 0;
byte fifoCountL2 = 0;
byte packetCount = 0x00;
boolean longPacket = false;
boolean firstPacket = true;
float q[4];
//This 3D array contains the default DMP memory bank binary that gets loaded during initialization.
//In the Invensense UC3-A3 firmware this is uploaded in 128 byte tranmissions, but the Arduino Wire
//library only supports 32 byte transmissions, including the register address to which you're writing,
//so I broke it up into 16 byte transmission payloads which are sent in the dmp_init() function below.
//
//This was reconstructed from observed I2C traffic generated by the UC3-A3 demo code, and not extracted
//directly from that code. That is true of all transmissions in this sketch, and any documentation has
//been added after the fact by referencing the Invensense code.
unsigned const char dmpMem[8][16][16] PROGMEM = {
{
{0xFB, 0x00, 0x00, 0x3E, 0x00, 0x0B, 0x00, 0x36, 0x00, 0x01, 0x00, 0x02, 0x00, 0x03, 0x00, 0x00},
{0x00, 0x65, 0x00, 0x54, 0xFF, 0xEF, 0x00, 0x00, 0xFA, 0x80, 0x00, 0x0B, 0x12, 0x82, 0x00, 0x01},
{0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x28, 0x00, 0x00, 0xFF, 0xFF, 0x45, 0x81, 0xFF, 0xFF, 0xFA, 0x72, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x03, 0xE8, 0x00, 0x00, 0x00, 0x01, 0x00, 0x01, 0x7F, 0xFF, 0xFF, 0xFE, 0x80, 0x01},
{0x00, 0x1B, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x3E, 0x03, 0x30, 0x40, 0x00, 0x00, 0x00, 0x02, 0xCA, 0xE3, 0x09, 0x3E, 0x80, 0x00, 0x00},
{0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x60, 0x00, 0x00, 0x00},
{0x41, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x0B, 0x2A, 0x00, 0x00, 0x16, 0x55, 0x00, 0x00, 0x21, 0x82},
{0xFD, 0x87, 0x26, 0x50, 0xFD, 0x80, 0x00, 0x00, 0x00, 0x1F, 0x00, 0x00, 0x00, 0x05, 0x80, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x02, 0x00, 0x00, 0x00, 0x03, 0x00, 0x00},
{0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x6F, 0x00, 0x02, 0x65, 0x32, 0x00, 0x00, 0x5E, 0xC0},
{0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0xFB, 0x8C, 0x6F, 0x5D, 0xFD, 0x5D, 0x08, 0xD9, 0x00, 0x7C, 0x73, 0x3B, 0x00, 0x6C, 0x12, 0xCC},
{0x32, 0x00, 0x13, 0x9D, 0x32, 0x00, 0xD0, 0xD6, 0x32, 0x00, 0x08, 0x00, 0x40, 0x00, 0x01, 0xF4},
{0xFF, 0xE6, 0x80, 0x79, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0xD0, 0xD6, 0x00, 0x00, 0x27, 0x10}
},
{
{0xFB, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x01, 0x00, 0x00, 0x00},
{0x00, 0x00, 0xFA, 0x36, 0xFF, 0xBC, 0x30, 0x8E, 0x00, 0x05, 0xFB, 0xF0, 0xFF, 0xD9, 0x5B, 0xC8},
{0xFF, 0xD0, 0x9A, 0xBE, 0x00, 0x00, 0x10, 0xA9, 0xFF, 0xF4, 0x1E, 0xB2, 0x00, 0xCE, 0xBB, 0xF7},
{0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x04, 0x00, 0x02, 0x00, 0x02, 0x02, 0x00, 0x00, 0x0C},
{0xFF, 0xC2, 0x80, 0x00, 0x00, 0x01, 0x80, 0x00, 0x00, 0xCF, 0x80, 0x00, 0x40, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x06, 0x00, 0x00, 0x00, 0x00, 0x14},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x03, 0x3F, 0x68, 0xB6, 0x79, 0x35, 0x28, 0xBC, 0xC6, 0x7E, 0xD1, 0x6C},
{0x80, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0xB2, 0x6A, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F, 0xF0, 0x00, 0x00, 0x00, 0x30},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x25, 0x4D, 0x00, 0x2F, 0x70, 0x6D, 0x00, 0x00, 0x05, 0xAE, 0x00, 0x0C, 0x02, 0xD0}
},
{
{0x00, 0x00, 0x00, 0x00, 0x00, 0x65, 0x00, 0x54, 0xFF, 0xEF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x01, 0x00, 0x00, 0x44, 0x00, 0x00, 0x00, 0x00, 0x0C, 0x00, 0x00, 0x00, 0x01, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x65, 0x00, 0x00, 0x00, 0x54, 0x00, 0x00, 0xFF, 0xEF, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x1B, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00},
{0x00, 0x1B, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00}
},
{
{0xD8, 0xDC, 0xBA, 0xA2, 0xF1, 0xDE, 0xB2, 0xB8, 0xB4, 0xA8, 0x81, 0x91, 0xF7, 0x4A, 0x90, 0x7F},
{0x91, 0x6A, 0xF3, 0xF9, 0xDB, 0xA8, 0xF9, 0xB0, 0xBA, 0xA0, 0x80, 0xF2, 0xCE, 0x81, 0xF3, 0xC2},
{0xF1, 0xC1, 0xF2, 0xC3, 0xF3, 0xCC, 0xA2, 0xB2, 0x80, 0xF1, 0xC6, 0xD8, 0x80, 0xBA, 0xA7, 0xDF},
{0xDF, 0xDF, 0xF2, 0xA7, 0xC3, 0xCB, 0xC5, 0xB6, 0xF0, 0x87, 0xA2, 0x94, 0x24, 0x48, 0x70, 0x3C},
{0x95, 0x40, 0x68, 0x34, 0x58, 0x9B, 0x78, 0xA2, 0xF1, 0x83, 0x92, 0x2D, 0x55, 0x7D, 0xD8, 0xB1},
{0xB4, 0xB8, 0xA1, 0xD0, 0x91, 0x80, 0xF2, 0x70, 0xF3, 0x70, 0xF2, 0x7C, 0x80, 0xA8, 0xF1, 0x01},
{0xB0, 0x98, 0x87, 0xD9, 0x43, 0xD8, 0x86, 0xC9, 0x88, 0xBA, 0xA1, 0xF2, 0x0E, 0xB8, 0x97, 0x80},
{0xF1, 0xA9, 0xDF, 0xDF, 0xDF, 0xAA, 0xDF, 0xDF, 0xDF, 0xF2, 0xAA, 0xC5, 0xCD, 0xC7, 0xA9, 0x0C},
{0xC9, 0x2C, 0x97, 0x97, 0x97, 0x97, 0xF1, 0xA9, 0x89, 0x26, 0x46, 0x66, 0xB0, 0xB4, 0xBA, 0x80},
{0xAC, 0xDE, 0xF2, 0xCA, 0xF1, 0xB2, 0x8C, 0x02, 0xA9, 0xB6, 0x98, 0x00, 0x89, 0x0E, 0x16, 0x1E},
{0xB8, 0xA9, 0xB4, 0x99, 0x2C, 0x54, 0x7C, 0xB0, 0x8A, 0xA8, 0x96, 0x36, 0x56, 0x76, 0xF1, 0xB9},
{0xAF, 0xB4, 0xB0, 0x83, 0xC0, 0xB8, 0xA8, 0x97, 0x11, 0xB1, 0x8F, 0x98, 0xB9, 0xAF, 0xF0, 0x24},
{0x08, 0x44, 0x10, 0x64, 0x18, 0xF1, 0xA3, 0x29, 0x55, 0x7D, 0xAF, 0x83, 0xB5, 0x93, 0xAF, 0xF0},
{0x00, 0x28, 0x50, 0xF1, 0xA3, 0x86, 0x9F, 0x61, 0xA6, 0xDA, 0xDE, 0xDF, 0xD9, 0xFA, 0xA3, 0x86},
{0x96, 0xDB, 0x31, 0xA6, 0xD9, 0xF8, 0xDF, 0xBA, 0xA6, 0x8F, 0xC2, 0xC5, 0xC7, 0xB2, 0x8C, 0xC1},
{0xB8, 0xA2, 0xDF, 0xDF, 0xDF, 0xA3, 0xDF, 0xDF, 0xDF, 0xD8, 0xD8, 0xF1, 0xB8, 0xA8, 0xB2, 0x86}
},
{
{0xB4, 0x98, 0x0D, 0x35, 0x5D, 0xB8, 0xAA, 0x98, 0xB0, 0x87, 0x2D, 0x35, 0x3D, 0xB2, 0xB6, 0xBA},
{0xAF, 0x8C, 0x96, 0x19, 0x8F, 0x9F, 0xA7, 0x0E, 0x16, 0x1E, 0xB4, 0x9A, 0xB8, 0xAA, 0x87, 0x2C},
{0x54, 0x7C, 0xB9, 0xA3, 0xDE, 0xDF, 0xDF, 0xA3, 0xB1, 0x80, 0xF2, 0xC4, 0xCD, 0xC9, 0xF1, 0xB8},
{0xA9, 0xB4, 0x99, 0x83, 0x0D, 0x35, 0x5D, 0x89, 0xB9, 0xA3, 0x2D, 0x55, 0x7D, 0xB5, 0x93, 0xA3},
{0x0E, 0x16, 0x1E, 0xA9, 0x2C, 0x54, 0x7C, 0xB8, 0xB4, 0xB0, 0xF1, 0x97, 0x83, 0xA8, 0x11, 0x84},
{0xA5, 0x09, 0x98, 0xA3, 0x83, 0xF0, 0xDA, 0x24, 0x08, 0x44, 0x10, 0x64, 0x18, 0xD8, 0xF1, 0xA5},
{0x29, 0x55, 0x7D, 0xA5, 0x85, 0x95, 0x02, 0x1A, 0x2E, 0x3A, 0x56, 0x5A, 0x40, 0x48, 0xF9, 0xF3},
{0xA3, 0xD9, 0xF8, 0xF0, 0x98, 0x83, 0x24, 0x08, 0x44, 0x10, 0x64, 0x18, 0x97, 0x82, 0xA8, 0xF1},
{0x11, 0xF0, 0x98, 0xA2, 0x24, 0x08, 0x44, 0x10, 0x64, 0x18, 0xDA, 0xF3, 0xDE, 0xD8, 0x83, 0xA5},
{0x94, 0x01, 0xD9, 0xA3, 0x02, 0xF1, 0xA2, 0xC3, 0xC5, 0xC7, 0xD8, 0xF1, 0x84, 0x92, 0xA2, 0x4D},
{0xDA, 0x2A, 0xD8, 0x48, 0x69, 0xD9, 0x2A, 0xD8, 0x68, 0x55, 0xDA, 0x32, 0xD8, 0x50, 0x71, 0xD9},
{0x32, 0xD8, 0x70, 0x5D, 0xDA, 0x3A, 0xD8, 0x58, 0x79, 0xD9, 0x3A, 0xD8, 0x78, 0x93, 0xA3, 0x4D},
{0xDA, 0x2A, 0xD8, 0x48, 0x69, 0xD9, 0x2A, 0xD8, 0x68, 0x55, 0xDA, 0x32, 0xD8, 0x50, 0x71, 0xD9},
{0x32, 0xD8, 0x70, 0x5D, 0xDA, 0x3A, 0xD8, 0x58, 0x79, 0xD9, 0x3A, 0xD8, 0x78, 0xA8, 0x8A, 0x9A},
{0xF0, 0x28, 0x50, 0x78, 0x9E, 0xF3, 0x88, 0x18, 0xF1, 0x9F, 0x1D, 0x98, 0xA8, 0xD9, 0x08, 0xD8},
{0xC8, 0x9F, 0x12, 0x9E, 0xF3, 0x15, 0xA8, 0xDA, 0x12, 0x10, 0xD8, 0xF1, 0xAF, 0xC8, 0x97, 0x87}
},
{
{0x34, 0xB5, 0xB9, 0x94, 0xA4, 0x21, 0xF3, 0xD9, 0x22, 0xD8, 0xF2, 0x2D, 0xF3, 0xD9, 0x2A, 0xD8},
{0xF2, 0x35, 0xF3, 0xD9, 0x32, 0xD8, 0x81, 0xA4, 0x60, 0x60, 0x61, 0xD9, 0x61, 0xD8, 0x6C, 0x68},
{0x69, 0xD9, 0x69, 0xD8, 0x74, 0x70, 0x71, 0xD9, 0x71, 0xD8, 0xB1, 0xA3, 0x84, 0x19, 0x3D, 0x5D},
{0xA3, 0x83, 0x1A, 0x3E, 0x5E, 0x93, 0x10, 0x30, 0x81, 0x10, 0x11, 0xB8, 0xB0, 0xAF, 0x8F, 0x94},
{0xF2, 0xDA, 0x3E, 0xD8, 0xB4, 0x9A, 0xA8, 0x87, 0x29, 0xDA, 0xF8, 0xD8, 0x87, 0x9A, 0x35, 0xDA},
{0xF8, 0xD8, 0x87, 0x9A, 0x3D, 0xDA, 0xF8, 0xD8, 0xB1, 0xB9, 0xA4, 0x98, 0x85, 0x02, 0x2E, 0x56},
{0xA5, 0x81, 0x00, 0x0C, 0x14, 0xA3, 0x97, 0xB0, 0x8A, 0xF1, 0x2D, 0xD9, 0x28, 0xD8, 0x4D, 0xD9},
{0x48, 0xD8, 0x6D, 0xD9, 0x68, 0xD8, 0xB1, 0x84, 0x0D, 0xDA, 0x0E, 0xD8, 0xA3, 0x29, 0x83, 0xDA},
{0x2C, 0x0E, 0xD8, 0xA3, 0x84, 0x49, 0x83, 0xDA, 0x2C, 0x4C, 0x0E, 0xD8, 0xB8, 0xB0, 0xA8, 0x8A},
{0x9A, 0xF5, 0x20, 0xAA, 0xDA, 0xDF, 0xD8, 0xA8, 0x40, 0xAA, 0xD0, 0xDA, 0xDE, 0xD8, 0xA8, 0x60},
{0xAA, 0xDA, 0xD0, 0xDF, 0xD8, 0xF1, 0x97, 0x86, 0xA8, 0x31, 0x9B, 0x06, 0x99, 0x07, 0xAB, 0x97},
{0x28, 0x88, 0x9B, 0xF0, 0x0C, 0x20, 0x14, 0x40, 0xB8, 0xB0, 0xB4, 0xA8, 0x8C, 0x9C, 0xF0, 0x04},
{0x28, 0x51, 0x79, 0x1D, 0x30, 0x14, 0x38, 0xB2, 0x82, 0xAB, 0xD0, 0x98, 0x2C, 0x50, 0x50, 0x78},
{0x78, 0x9B, 0xF1, 0x1A, 0xB0, 0xF0, 0x8A, 0x9C, 0xA8, 0x29, 0x51, 0x79, 0x8B, 0x29, 0x51, 0x79},
{0x8A, 0x24, 0x70, 0x59, 0x8B, 0x20, 0x58, 0x71, 0x8A, 0x44, 0x69, 0x38, 0x8B, 0x39, 0x40, 0x68},
{0x8A, 0x64, 0x48, 0x31, 0x8B, 0x30, 0x49, 0x60, 0xA5, 0x88, 0x20, 0x09, 0x71, 0x58, 0x44, 0x68}
},
{
{0x11, 0x39, 0x64, 0x49, 0x30, 0x19, 0xF1, 0xAC, 0x00, 0x2C, 0x54, 0x7C, 0xF0, 0x8C, 0xA8, 0x04},
{0x28, 0x50, 0x78, 0xF1, 0x88, 0x97, 0x26, 0xA8, 0x59, 0x98, 0xAC, 0x8C, 0x02, 0x26, 0x46, 0x66},
{0xF0, 0x89, 0x9C, 0xA8, 0x29, 0x51, 0x79, 0x24, 0x70, 0x59, 0x44, 0x69, 0x38, 0x64, 0x48, 0x31},
{0xA9, 0x88, 0x09, 0x20, 0x59, 0x70, 0xAB, 0x11, 0x38, 0x40, 0x69, 0xA8, 0x19, 0x31, 0x48, 0x60},
{0x8C, 0xA8, 0x3C, 0x41, 0x5C, 0x20, 0x7C, 0x00, 0xF1, 0x87, 0x98, 0x19, 0x86, 0xA8, 0x6E, 0x76},
{0x7E, 0xA9, 0x99, 0x88, 0x2D, 0x55, 0x7D, 0x9E, 0xB9, 0xA3, 0x8A, 0x22, 0x8A, 0x6E, 0x8A, 0x56},
{0x8A, 0x5E, 0x9F, 0xB1, 0x83, 0x06, 0x26, 0x46, 0x66, 0x0E, 0x2E, 0x4E, 0x6E, 0x9D, 0xB8, 0xAD},
{0x00, 0x2C, 0x54, 0x7C, 0xF2, 0xB1, 0x8C, 0xB4, 0x99, 0xB9, 0xA3, 0x2D, 0x55, 0x7D, 0x81, 0x91},
{0xAC, 0x38, 0xAD, 0x3A, 0xB5, 0x83, 0x91, 0xAC, 0x2D, 0xD9, 0x28, 0xD8, 0x4D, 0xD9, 0x48, 0xD8},
{0x6D, 0xD9, 0x68, 0xD8, 0x8C, 0x9D, 0xAE, 0x29, 0xD9, 0x04, 0xAE, 0xD8, 0x51, 0xD9, 0x04, 0xAE},
{0xD8, 0x79, 0xD9, 0x04, 0xD8, 0x81, 0xF3, 0x9D, 0xAD, 0x00, 0x8D, 0xAE, 0x19, 0x81, 0xAD, 0xD9},
{0x01, 0xD8, 0xF2, 0xAE, 0xDA, 0x26, 0xD8, 0x8E, 0x91, 0x29, 0x83, 0xA7, 0xD9, 0xAD, 0xAD, 0xAD},
{0xAD, 0xF3, 0x2A, 0xD8, 0xD8, 0xF1, 0xB0, 0xAC, 0x89, 0x91, 0x3E, 0x5E, 0x76, 0xF3, 0xAC, 0x2E},
{0x2E, 0xF1, 0xB1, 0x8C, 0x5A, 0x9C, 0xAC, 0x2C, 0x28, 0x28, 0x28, 0x9C, 0xAC, 0x30, 0x18, 0xA8},
{0x98, 0x81, 0x28, 0x34, 0x3C, 0x97, 0x24, 0xA7, 0x28, 0x34, 0x3C, 0x9C, 0x24, 0xF2, 0xB0, 0x89},
{0xAC, 0x91, 0x2C, 0x4C, 0x6C, 0x8A, 0x9B, 0x2D, 0xD9, 0xD8, 0xD8, 0x51, 0xD9, 0xD8, 0xD8, 0x79}
},
{
{0xD9, 0xD8, 0xD8, 0xF1, 0x9E, 0x88, 0xA3, 0x31, 0xDA, 0xD8, 0xD8, 0x91, 0x2D, 0xD9, 0x28, 0xD8},
{0x4D, 0xD9, 0x48, 0xD8, 0x6D, 0xD9, 0x68, 0xD8, 0xB1, 0x83, 0x93, 0x35, 0x3D, 0x80, 0x25, 0xDA},
{0xD8, 0xD8, 0x85, 0x69, 0xDA, 0xD8, 0xD8, 0xB4, 0x93, 0x81, 0xA3, 0x28, 0x34, 0x3C, 0xF3, 0xAB},
{0x8B, 0xF8, 0xA3, 0x91, 0xB6, 0x09, 0xB4, 0xD9, 0xAB, 0xDE, 0xFA, 0xB0, 0x87, 0x9C, 0xB9, 0xA3},
{0xDD, 0xF1, 0xA3, 0xA3, 0xA3, 0xA3, 0x95, 0xF1, 0xA3, 0xA3, 0xA3, 0x9D, 0xF1, 0xA3, 0xA3, 0xA3},
{0xA3, 0xF2, 0xA3, 0xB4, 0x90, 0x80, 0xF2, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3},
{0xA3, 0xB2, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xB0, 0x87, 0xB5, 0x99, 0xF1, 0xA3, 0xA3, 0xA3},
{0x98, 0xF1, 0xA3, 0xA3, 0xA3, 0xA3, 0x97, 0xA3, 0xA3, 0xA3, 0xA3, 0xF3, 0x9B, 0xA3, 0xA3, 0xDC},
{0xB9, 0xA7, 0xF1, 0x26, 0x26, 0x26, 0xD8, 0xD8, 0xFF}
}
};
//DMP update transmissions (Bank, Start Address, Update Length, Update Data...)
static byte dmp_updates[29][9] =
{
{
0x03, 0x7B, 0x03, 0x4C, 0xCD, 0x6C} //FCFG_1 inv_set_gyro_calibration
,
{
0x03, 0xAB, 0x03, 0x36, 0x56, 0x76 } //FCFG_3 inv_set_gyro_calibration
,
{
0x00, 0x68, 0x04, 0x02, 0xCB, 0x47, 0xA2 } //D_0_104 inv_set_gyro_calibration
,
{
0x02, 0x18, 0x04, 0x00, 0x05, 0x8B, 0xC1 } //D_0_24 inv_set_gyro_calibration
,
{
0x01, 0x0C, 0x04, 0x00, 0x00, 0x00, 0x00 } //D_1_152 inv_set_accel_calibration
,
{
0x03, 0x7F, 0x06, 0x0C, 0xC9, 0x2C, 0x97, 0x97, 0x97 } //FCFG_2 inv_set_accel_calibration
,
{
0x03, 0x89, 0x03, 0x26, 0x46, 0x66 } //FCFG_7 inv_set_accel_calibration
,
{
0x00, 0x6C, 0x02, 0x20, 0x00 } //D_0_108 inv_set_accel_calibration
,
{
0x02, 0x40, 0x04, 0x00, 0x00, 0x00, 0x00 } //CPASS_MTX_00 inv_set_compass_calibration
,
{
0x02, 0x44, 0x04, 0x00, 0x00, 0x00, 0x00 } //CPASS_MTX_01
,
{
0x02, 0x48, 0x04, 0x00, 0x00, 0x00, 0x00 } //CPASS_MTX_02
,
{
0x02, 0x4C, 0x04, 0x00, 0x00, 0x00, 0x00 } //CPASS_MTX_10
,
{
0x02, 0x50, 0x04, 0x00, 0x00, 0x00, 0x00 } //CPASS_MTX_11
,
{
0x02, 0x54, 0x04, 0x00, 0x00, 0x00, 0x00 } //CPASS_MTX_12
,
{
0x02, 0x58, 0x04, 0x00, 0x00, 0x00, 0x00 } //CPASS_MTX_20
,
{
0x02, 0x5C, 0x04, 0x00, 0x00, 0x00, 0x00 } //CPASS_MTX_21
,
{
0x02, 0xBC, 0x04, 0x00, 0x00, 0x00, 0x00 } //CPASS_MTX_22
,
{
0x01, 0xEC, 0x04, 0x00, 0x00, 0x40, 0x00 } //D_1_236 inv_apply_endian_accel
,
{
0x03, 0x7F, 0x06, 0x0C, 0xC9, 0x2C, 0x97, 0x97, 0x97 } //FCFG_2 inv_set_mpu_sensors
,
{
0x04, 0x02, 0x03, 0x0D, 0x35, 0x5D } //CFG_MOTION_BIAS inv_turn_on_bias_from_no_motion
,
{
0x04, 0x09, 0x04, 0x87, 0x2D, 0x35, 0x3D } //FCFG_5 inv_set_bias_update
,
{
0x00, 0xA3, 0x01, 0x00 } //D_0_163 inv_set_dead_zone
,
//SET INT_ENABLE at i=22
{
0x07, 0x86, 0x01, 0xFE } //CFG_6 inv_set_fifo_interupt
,
{
0x07, 0x41, 0x05, 0xF1, 0x20, 0x28, 0x30, 0x38 } //CFG_8 inv_send_quaternion
,
{
0x07, 0x7E, 0x01, 0x30 } //CFG_16 inv_set_footer
,
{
0x07, 0x46, 0x01, 0x9A } //CFG_GYRO_SOURCE inv_send_gyro
,
{
0x07, 0x47, 0x04, 0xF1, 0x28, 0x30, 0x38 } //CFG_9 inv_send_gyro -> inv_construct3_fifo
,
{
0x07, 0x6C, 0x04, 0xF1, 0x28, 0x30, 0x38 } //CFG_12 inv_send_accel -> inv_construct3_fifo
,
{
0x02, 0x16, 0x02, 0x00, 0x0A } //D_0_22 inv_set_fifo_rate
};
void setup(){
Serial.begin(115200);
/*
while(!Serial.available()){
if(Serial.available()){
byte hereWeGo = Serial.read();
if( hereWeGo == 't'){
break;
}
}
}
*/
Wire.begin();
delay(1);
check_MPU();
Serial.println("MPU-6050 6-Axis");
regWrite(0x6B, 0xC0);
regWrite(0x6C, 0x00);
delay(10);
// regWrite(0x6B, 0x70);
regWrite(0x6B, 0x00);
regWrite(0x6D, 0x70);
regWrite(0x6E, 0x06);
temp = regRead(0x6F);
Serial.print("Bank 1, Reg 6 = ");
Serial.println(temp, HEX);
// temp = regRead(0x6B);
// Serial.println(temp, HEX);
regWrite(0x6D, 0x00);
temp = regRead(0x00);
Serial.println(temp, HEX);
temp = regRead(0x01);
Serial.println(temp, HEX);
temp = regRead(0x02);
Serial.println(temp, HEX);
temp = regRead(0x6A);
Serial.println(temp, HEX);
regWrite(0x37, 0x32);
temp = regRead(0x6B);
Serial.println(temp, HEX);
delay(5);
// regWrite(0x25, 0x68); //Set Slave 0 to self
//
// regWrite(0x6A, 0x02);
mem_init();
delay(20);
}
void dmp_init(){
for(int i = 0; i < 7; i++){
bank_sel(i);
for(byte j = 0; j < 16; j++){
byte start_addy = j * 0x10;
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(start_addy);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for(int k = 0; k < 16; k++){
unsigned char byteToSend = pgm_read_byte(&(dmpMem[i][j][k]));
Wire.write((byte) byteToSend);
}
Wire.endTransmission();
}
// Wire.beginTransmission(MPU_ADDR);
// Wire.write(MEM_R_W);
// Wire.endTransmission();
// Wire.requestFrom(MPU_ADDR, 16);
// byte echoback[16];
// for(int j = 0; j < 16; j++){
// echoback[j] = Wire.read();
// }
// for(int j = 0; j < 16; j++){
// Serial.print(echoback[j], HEX);
// }
}
bank_sel(7);
for(byte j = 0; j < 8; j++){
byte start_addy = j * 0x10;
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(start_addy);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for(int k = 0; k < 16; k++){
unsigned char byteToSend = pgm_read_byte(&(dmpMem[7][j][k]));
Wire.write((byte) byteToSend);
}
Wire.endTransmission();
}
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(0x80);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for(int k = 0; k < 9; k++){
unsigned char byteToSend = pgm_read_byte(&(dmpMem[7][8][k]));
Wire.write((byte) byteToSend);
}
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR,9);
// Wire.endTransmission();
byte incoming[9];
for(int i = 0; i < 9; i++){
incoming[i] = Wire.read();
}
// bank_sel(3);
// Wire.beginTransmission(MPU_ADDR);
// Wire.write(MEM_START_ADDR);
// Wire.write(0x10);
// Wire.endTransmission();
// Wire.beginTransmission(MPU_ADDR);
// Wire.write(MEM_R_W);
// Wire.endTransmission();
// Wire.beginTransmission(MPU_ADDR);
// Wire.requestFrom(MPU_ADDR,16);
// Wire.endTransmission();
// byte incoming[16];
// for(int i = 0; i < 16; i++){
// incoming[i] = Wire.read();
// }
}
void mem_init(){
dmp_init();
for(byte i = 0; i < 22; i++){
bank_sel(dmp_updates[i][0]);
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(dmp_updates[i][1]);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for(byte j = 0; j < dmp_updates[i][2]; j++){
Wire.write(dmp_updates[i][j+3]);
}
Wire.endTransmission();
}
regWrite(0x38, 0x32);
for(byte i = 22; i < 29; i++){
bank_sel(dmp_updates[i][0]);
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_START_ADDR);
Wire.write(dmp_updates[i][1]);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.write(MEM_R_W);
for(byte j = 0; j < dmp_updates[i][2]; j++){
Wire.write(dmp_updates[i][j+3]);
}
Wire.endTransmission();
}
temp = regRead(0x6B);
Serial.println(temp, HEX);
temp = regRead(0x6C);
Serial.println(temp, HEX);
regWrite(0x38, 0x02);
regWrite(0x6B, 0x03);
// regWrite(0x6B, 0x70);
// regWrite(0x38, 0x38);
// regWrite(0x6B, 0x73);
regWrite(0x19, 0x04);
regWrite(0x1B, 0x18);
regWrite(0x1A, 0x0B);
regWrite(0x70, 0x03);
regWrite(0x71, 0x00);
regWrite(0x00, 0x00);
regWrite(0x01, 0x00);
regWrite(0x02, 0x00);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x13);
for(byte i = 0; i < 6; i++){
Wire.write(0x00);
}
Wire.endTransmission();
// regWrite(0x24, 0x00);
bank_sel(0x01);
regWrite(0x6E, 0xB2);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0xFF); Wire.write(0xFF);
Wire.endTransmission();
bank_sel(0x01);
regWrite(0x6E, 0x90);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0x09); Wire.write(0x23); Wire.write(0xA1); Wire.write(0x35);
Wire.endTransmission();
temp = regRead(0x6A);
regWrite(0x6A, 0x04);
//Insert FIFO count read?
fifoReady();
regWrite(0x6A, 0x00);
regWrite(0x6B, 0x03);
delay(2);
temp = regRead(0x6C);
// Serial.println(temp, HEX);
regWrite(0x6C, 0x00);
temp = regRead(0x1C);
// Serial.println(temp, HEX);
regWrite(0x1C, 0x00);
delay(2);
temp = regRead(0x6B);
// Serial.println(temp, HEX);
regWrite(0x1F, 0x02);
regWrite(0x21, 0x9C);
regWrite(0x20, 0x50);
regWrite(0x22, 0x00);
regWrite(0x6A, 0x04);
regWrite(0x6A, 0x00);
regWrite(0x6A, 0xC8);
bank_sel(0x01);
regWrite(0x6E, 0x6A);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0x06); Wire.write(0x00);
Wire.endTransmission();
bank_sel(0x01);
regWrite(0x6E, 0x60);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
for(byte i = 0; i < 8; i++){
Wire.write(0x00);
}
Wire.endTransmission();
// bank_sel(0x01);
// regWrite(0x6E, 0x60);
// Wire.beginTransmission(MPU_ADDR);
// Wire.write(0x6F);
// Wire.write(0x04); Wire.write(0x00); Wire.write(0x00); Wire.write(0x00);
// Wire.endTransmission();
bank_sel(0x00);
regWrite(0x6E, 0x60);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0x40); Wire.write(0x00); Wire.write(0x00); Wire.write(0x00);
Wire.endTransmission();
//resetFifo();
}
void regWrite(byte addy, byte regUpdate){
Wire.beginTransmission(MPU_ADDR);
Wire.write(addy);
Wire.write(regUpdate);
Wire.endTransmission();
}
byte regRead(byte addy){
Wire.beginTransmission(MPU_ADDR);
Wire.write(addy);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR,1);
// Wire.endTransmission();
while(!Wire.available()){
}
byte incoming = Wire.read();
return incoming;
}
void getPacket(){
if(fifoCountL > 32){
fifoCountL2 = fifoCountL - 32;
longPacket = true;
}
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x74);
Wire.endTransmission();
// Wire.requestFrom(MPU_ADDR, 42);
// for(byte i = 0; i < fifoCountL; i++){
if(longPacket){
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, 32);
for(byte i = 0; i < 32; i++){
received_packet[i] = Wire.read();
}
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x74);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, (unsigned int)fifoCountL2);
for(byte i = 32; i < fifoCountL; i++){
received_packet[i] = Wire.read();
}
longPacket = false;
}
else{
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR, (unsigned int)fifoCountL);
for(byte i = 0; i < fifoCountL; i++){
received_packet[i] = Wire.read();
}
}
}
byte read_interrupt(){
byte int_status = regRead(0x3A);
return int_status;
}
boolean fifoReady(){
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x72);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR,2);
// Wire.endTransmission();
byte fifoCountH = Wire.read();
fifoCountL = Wire.read();
// Serial.println(fifoCountL, DEC);
if(fifoCountL == 42 || fifoCountL == 44){
return 1;
}
// else if(fifoCountL != 0){
// resetFifo();
// }
// else if(fifoCountL == 42){
// getPacket();
// bank_sel(0);
// regWrite(0x6E, 0x60);
// Wire.beginTransmission(MPU_ADDR);
// Wire.write(0x40); Wire.write(0x00); Wire.send (0x00); Wire.write(0x00);
// Wire.endTransmission();
// resetFifo();
// }
// if(Wire.read() == 0x2C){
// return 1;
// }
else return 0;
}
void resetFifo(){
byte ctrl = regRead(0x6A);
ctrl |= 0b00000100;
regWrite(0x6A, ctrl);
}
void loop(){
if(millis() >= lastRead + 10){
lastRead = millis();
// byte int_status = read_interrupt();
// if(int_status & 0b00010000 != 0){
// resetFifo();
// Serial.println("FIFO Overflow");
// }
// if(int_status & 0b00000011 != 0){
// getPacket();
// sendPacket();
// }
if(fifoReady()){
getPacket();
temp = regRead(0x3A);
if(firstPacket){
delay(1);
bank_sel(0x00);
regWrite(0x6E, 0x60);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.write(0x04); Wire.write(0x00); Wire.write(0x00); Wire.write(0x00);
// Wire.write(0x00); Wire.write(0x80); Wire.write(0x00); Wire.write(0x00);
Wire.endTransmission();
bank_sel(1);
regWrite(0x6E, 0x62);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6F);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR,2);
temp = Wire.read();
temp = Wire.read();
firstPacket = false;
fifoReady();
}
// resetFifo();
if(fifoCountL == 42){
processQuat();
sendQuat();
}
// int receivedInts[10] = {(((int)received_packet[0] << 8) | received_packet[1]),
// (((int)received_packet[4] << 8) | received_packet[5]),
// (((int)received_packet[8] << 8) | received_packet[9]),
// (((int)received_packet[12] << 8) | received_packet[13]),
// (((int)received_packet[16] << 8) | received_packet[17]),
// (((int)received_packet[20] << 8) | received_packet[21]),
// (((int)received_packet[24] << 8) | received_packet[25]),
// (((int)received_packet[28] << 8) | received_packet[29]),
// (((int)received_packet[32] << 8) | received_packet[33]),
// (((int)received_packet[36] << 8) | received_packet[37])
// };
//
// for(int i = 0; i<10; i++){
// Serial.print(receivedInts[i], DEC); Serial.print(" ");
// }
// Serial.println();
// sendPacket();
}
}
}
void check_MPU(){
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x75);
Wire.endTransmission();
Wire.beginTransmission(MPU_ADDR);
Wire.requestFrom(MPU_ADDR,1);
byte aByte = Wire.read();
// Wire.endTransmission();
// while(Wire.available() == 0){
// }
// byte temp = Wire.read();
// Serial.println(temp);
if(aByte == 0x68){
Serial.println("Found MPU6050");
}
else{
Serial.println("Didn't find MPU6050");
}
}
void processQuat(){
processed_packet[0] = received_packet[0];
processed_packet[1] = received_packet[1];
processed_packet[2] = received_packet[4];
processed_packet[3] = received_packet[5];
processed_packet[4] = received_packet[8];
processed_packet[5] = received_packet[9];
processed_packet[6] = received_packet[12];
processed_packet[7] = received_packet[13];
}
void sendQuat(){
/*
byte packetType = 0x02;
byte button = 0x00;
Serial.print("$"); Serial.print(packetType);
for(byte i = 0; i < 8; i++){
Serial.print(processed_packet[i]);
}
Serial.print(button); Serial.print(packetCount);
Serial.print("\r\n");
if(packetCount < 0xFF){packetCount++;}
else{packetCount = 0x00;}
*/
// following conversion adapted from Invensense's TeaPot example
q[0] = (long) ((((unsigned long) processed_packet[0]) << 8) + ((unsigned long) processed_packet[1]));
q[1] = (long) ((((unsigned long) processed_packet[2]) << 8) + ((unsigned long) processed_packet[3]));
q[2] = (long) ((((unsigned long) processed_packet[4]) << 8) + ((unsigned long) processed_packet[5]));
q[3] = (long) ((((unsigned long) processed_packet[6]) << 8) + ((unsigned long) processed_packet[7]));
for(int i = 0; i < 4; i++ ) {
if( q[i] > 32767 ) {
q[i] -= 65536;
}
q[i] = ((float) q[i]) / 16384.0f;
}
serialPrintFloatArr(q, 4);
Serial.print("\n");
}
void sendPacket(){
for(byte i = 0; i < fifoCountL-1; i++){
Serial.print(received_packet[i], HEX); Serial.print(" ");
}
Serial.println(received_packet[fifoCountL-1], HEX); Serial.println();
}
void sendHeader(){
for(byte i = 0; i < 2; i++){
Serial.print(received_packet[i], HEX); Serial.print(" ");
}
Serial.println();
}
void bank_sel(byte bank){
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6D);
Wire.write(bank);
Wire.endTransmission();
}
void serialPrintFloatArr(float * arr, int length) {
for(int i=0; i<length; i++) {
serialFloatPrint(arr[i]);
Serial.print(",");
}
}
void serialFloatPrint(float f) {
byte * b = (byte *) &f;
for(int i=0; i<4; i++) {
byte b1 = (b[i] >> 4) & 0x0f;
byte b2 = (b[i] & 0x0f);
char c1 = (b1 < 10) ? ('0' + b1) : 'A' + b1 - 10;
char c2 = (b2 < 10) ? ('0' + b2) : 'A' + b2 - 10;
Serial.print(c1);
Serial.print(c2);
}
}
ti lascio leggere da solo lo sketch e mi soffermo solo sulla linea 34 in cui devi personalizzare l’indirizzo I2C in modo che la libreria Wire.h possa comunicare con il componete 10 DOF IMU.
Warning!
Purtroppo nella ricerca mi sono perso il link dell’autore e chiedo scusa per non averlo citato. Se riconosci questo sketch come tuo e vuoi mandarmi il link in cui lo hai pubblicato, scrivimi alla casella info del blog.
Processing FreeIMU Cube
Sul sito varesano.net trovi il link al Git ( https://github.com/Fabio-Varesano-Association/freeimu ) in cui puoi scaricare l’ultima versione disponibile del sw FreeIMU che contiene freeimu/processing/FreeIMU_cube/FreeIMU_cube.pde il programma che ti permette di visualizzare su processing il cubo e interfacciarlo al tuo 10 DOF:
apri l’intefaccia Processing e carica il programma FreeIMU_cube.pde:
ricordati di personalizzare la linea evidenziata in giallo che contiene la definizione della porta USB che comunica con Arduino ed attraverso la quale il 10 DOF ed il FreeIMU Cube comunicano.
Se hai eseguito tutte le configurazioni in modo corretto ed i componenti funzionano dovresti vedere sul tuo video qualcosa di simile:

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
4 commenti
Vai al modulo dei commenti
Grande Mauro, come sempre. Questa volta grandissimo perchè hai citato e ti sei ricordato di Fabio, che non ha avuto fortuna per niente. Permettimi di dire anche che la comunità lo ha un po dimenticato. Mentre lui aveva sviluppato un lavoro, che se ricordo bene, è alla base anche dei moderni quadricotteri.
Ricordo molto bene quelle 2 giornate a Milano, con Fabio che presentava il suo lavoro.
Con questo https://www.futurashop.it/accelerometro-3-assi-7300-mma7361, funziona lo stesso lo sketch?
Ciao Mauro.
Autore
Grazie Agostino,
purtroppo ho appreso la triste notizia su Fabio in occasione di questi test, non l’ho mai conosciuto bene ma di certo merita tutta la mia stima per quello che ha lasciato alla community dei quadricotteri e non solo.
L’accellerometro a 3 assi é solo una delle componenti necessarie al funzionamento del sw per quadricotteri, é necessario affiancarci almeno un giroscopio ed usare un sistema 6 DOF ( il solo accelerometro a 3 assi é un 3 DOF )
Inoltre durante i test con Costantino al WeMake ci siamo accorti che il sw interpreta le vibrazioni, tenendolo in mano, come piccoli ma continui spostamenti orizzontali ( asse Z ) per cui il cubo é sempre leggermente in rotazione. Per correggere questa informazione integrerò anche l’informazione del magnetometro ( o compass o bussola ) a questo punto hai un 9 DOF e il passo a comprare un 10 DOF é inferiore all’euro ed hai anche un altimetro preciso con questo sensore.
Ciao Mauro, ti seguo da un po sul blog e in particolare per quel riguarda arduino. Al momento sto cercando di far comunicare l’Adafruit feather M0 con il mac utilizzando anche processing. L’idea di base è fare in modo che lo sketch che tu stesso hai pubblicato (quello in cui usi l’MPU6050 e il parallelepipedo su processing) funzioni tramite bluetooth. E’ una cosa abbastanza impossibile vero? (il fatto che sia un BLE l’adafruit lo rende impossibile?)
Autore
Ciao Giovanni,
penso sia possibile.
Dovrai lavorare molto sulla parte Bluetooth BLE che presenta molte “future” importanti ma come tale è meno intuitivo del classico bluetooth.
Ti consiglio di iniziare con lo studio del protocollo BLE e come sfruttare la comunicazione seriale su tale protocollo.